

Exhibitors 2018
- HOME AUTOMATION
- ROBOTICS
- YOUNG MAKERS (< 18)
- OPEN SOURCE
- 3D PRINTING
- DRONES
- EDUCATION
- FABRICATION
- HACKS
- NEW MANUFACTURING
- SCIENCE
- ENERGY & SUSTAINABILITY
- ART
- INTERNET OF THINGS
- MUSIC & SOUND
- RECYCLING & UPCYCLING
- KIDS & EDUCATION
- ARTISANS & NEW CRAFT
- CULTURAL HERITAGE
- GAMES
- WELLNESS & HEALTHCARE
- FASHION & WEARABLES
- FOOD & AGRICULTURE
- BIOLOGY
- 3D SCANNING
- AEROSPACE
- STEAM PUNK
- ARTIFICIAL INTELLIGENCE
- ARDUINO
- CROWDFUNDING
Result for TAG "Drones"
Jasmin Velagic, Dinko Osmankovic
The proposed module uses Scanse Sweep rotating 2D laser to build 2D map, while employing a standard Pololu MinIMU-9 to obtain angle information that is used to associate 2D planes to 3D environment. It is easily connected to standard ROS environment, and can be installed on any robotic system of any type, e.g. Octorotor UAV etc.

ACEA SpA
Acea is one of the leading Italian multiutility operators. Listed on the Stock Exchange since 1999, the
company manages and develops water and electricity netw …

Fab Lab class with Mr Zoffoli, Marymount International School Rome
An advanced and autonomous drone with an anti-collision system and a surveillance system. It uses two optical cameras, a radiometric thermal camera and a 3D camera to carry out a variety of missions, especially defense ones.

Conrad Electronic
Practice makes the maker!
Conrad Electronic presents itself at the Maker Faire Rome as a partner of all tekkies & makers.
Experience exciting workshops on var …

Jasmin Velagic, Dinko Osmankovic
The system can be used as quadrotor or octorotor UAV system for standard UAV teleoperations. It is equipped with a camera for in-flight visual guidance, Pixhawk embedded hardware for hard real-time control and Hardkernel ODROID XU4 embedded system for a high level control.

Digi-Key Electronics
Digi-Key is an American Company , privately owned with 3500 employees around the world and a total turnover of 2.3B$ per year. From a single point of shipmen …

DOC SERVIZI SOC. COOP.
Doc Servizi was born to protect and valorize the work of professionals in the field of music, theater and arts, who have to face a complex law, a difficult mana …

FlyingScarecrows
A drone, automatic both in flight and recharge, that scares birds away, saving farmers' money and time.

Arpaia Pasquale, Francesco Bonavolontà, Francesco Serino, Ferdinando Chianese, Luca Porzio, Rosario Schiano Lo Moriello, Edoardo Campoluongo, Annalisa Liccardo
AIRPOD, Unina Corse, AR

Gruppo 7 ITS Meccatronico Vicenza
The project is an Automated Guided Vehicle, designed for the gardening. It's a lawnmower while it can snowplow the garden.
Rainbow team
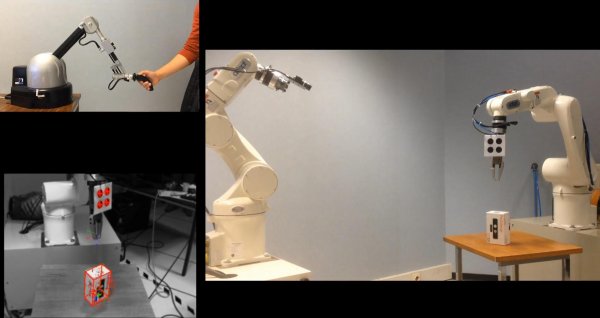
Robots are fast, precise and reliable, but also very stupid. However, luckily humans can help them performing their tasks.
Prof. Vincenzo Lippiello
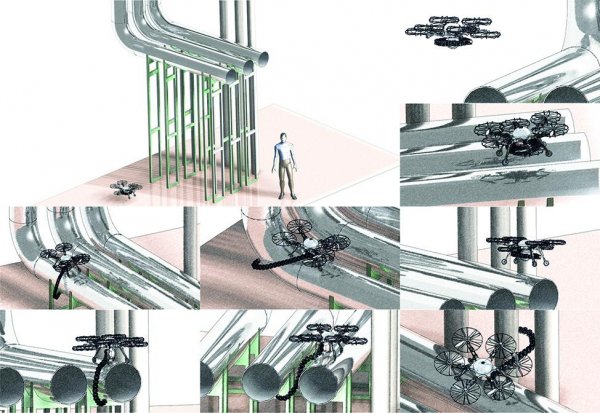
HYFLIERS will develop the world's first industrial integrated robot with hybrid air and ground mobility with a long-reach hyper-redundant manipulator capable of reaching sites where no other robot can access, reducing the exposition of human inspectors to potentially dangerous working conditions.
Silvano Fares, Alessandro Alivernini
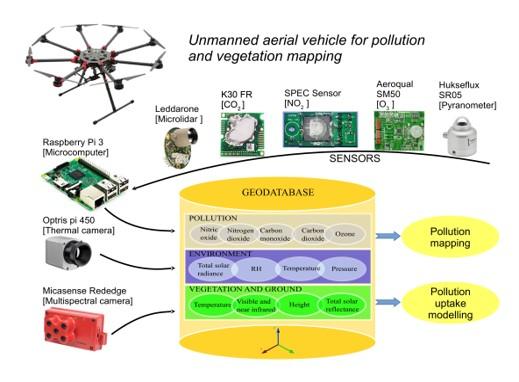
Un drone multirotore equipaggiato con sensoristica in grado di rilevare lo stato di salute della vegetazione

Ramy Rashad , Robotics and Mechatronics Group, UTwente
The next generation of aerial robots actively interacting with the environment and humans.

Media Direct Srl
CampuStore's motto is Innovation for education, where education does not only stand for schools and universities, but also any other organization dealing with t …
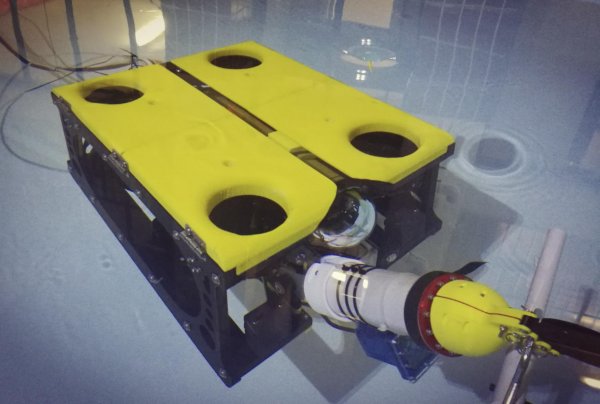
Team PoliTOcean - Politecnico di Torino
An R.O.V is an underwater drone used for special purpose and often dangerous applications

Oracle Innovation Lab - Italia
Proxima Smart City: model of a scaled down automated city implementing, via IoT and Cloud Computing, several useful functions such as Smart Building, Smart Parking, Smart Trash, Smart Lighting and Smart Safety.

Jasmin Velagic, Dinko Osmankovic
The developed heterogeneous stereo camera module contains a standard RGB and thermal cameras, and Odroid embedded system which is used for sensor data fusion and image processing and analyzing. The system provides a precise detection of thermal features while also extracting these regions in RGB image to detect roofs, windows, doors and similar object where heat is usually lost in the buildings.

REGIONE LAZIO
Lazio Region shows at Maker Faire new ideas by creatives from Lazio.
36 projects and prototypes, selected with a call for startups, smes, makers and innovator …
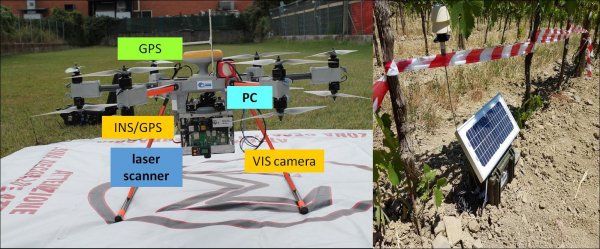
Beniamino Gioli, Piero Toscano, Alessandro Matese, Filippo Di Gennaro, Andrea Berton Federico Carotenuto, Alessandro Zaldei, Carolina Vagnoli
Un nuovo approccio per l’agricoltura di precisione si basa sulla robotica, in cui una piattaforma tecnologica (drone o un rover terrestre) può prendere decisioni autonome basandosi sul contesto, come riconoscere una pianta da sottoporre ad un trattamento, o ricostruire la geometria dei filari per potersi muovere al suo interno.
Per questa applicazione abbiamo impiegato tecnologie basate su sensori low-cost derivati dal segmento automotive, quali laser scanner e sensori ottici. Verranno mostrate alcune soluzioni tecnologiche (stazione agrometeorologica low cost Agroduino), una piattaforma UAV ed un insieme di sensori laser ed ottici.
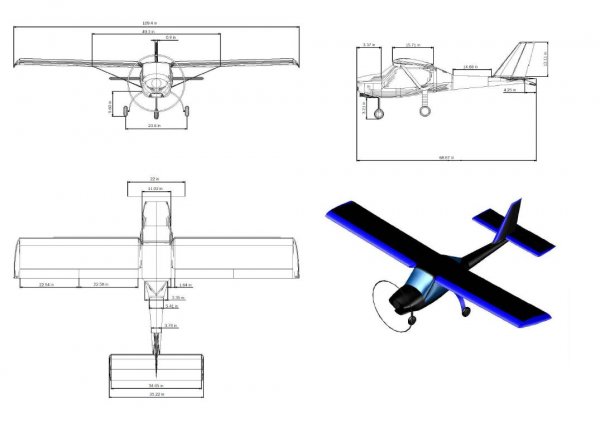
SASA - Sapienza Flight Team
the project consists in the realization of a UAV (Unmanned Aerial Vehicle)

SASA - Sapienza SpaceTeam
The work of the team is based on a simulation on a smaller scale of a space mission in which the main phases are “ascent” and “atmospheric reentry
SASA - Sapienza Technology Team
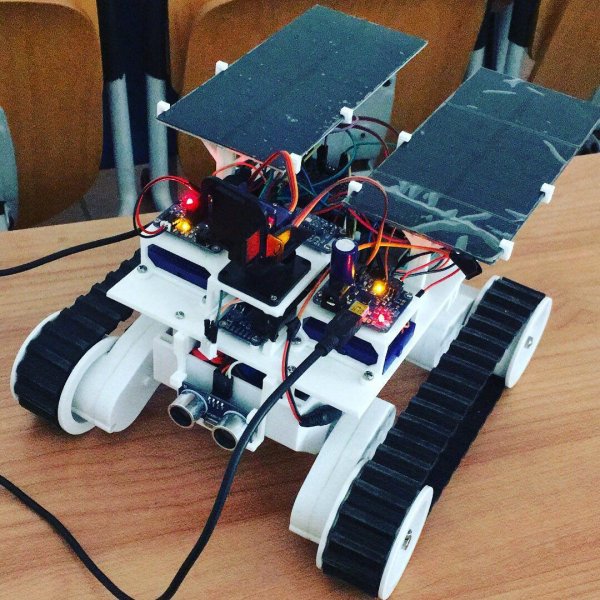
The project consists in the simulation of a Exploration Space Mission with a self-propelled ROVER

Sony
At this year's Maker Faire show in Rome, the Sony Semiconductor Solutions Corp and Sony Developer Program team present the new Spresense IoT development board. …

Alessandro Paglialunga - Superelectric Srl
systemONE is a hyperspectral/mulristectral/thermal sensor for UAVs for Precision Agriculture, Environmental, Pollution Monitoring, Archeology, Utilities and Critical Infrastructures Monitoring.

Mimesis s.r.l. + Allievi ITS MAKER sedi Emilia Romagna
An innovative autonomic guide vehicle-lab for airflow accurate measurements in tunnels

TEKO S.p.A.
TEKO Company was founded on 1957. Helping you gain a competitive advantage through innovative electronics enclosures. Teko delivers world-class enclosures to el …

ITI "Enrico Fermi" Mantova, classe 5CCH
Tibic is a monitoring system, built on ESP32, designed for indoor or outdoor crops.

uRAD
uRAD is a radar shield that you can connect directly on your Arduino or Raspberry Pi to develop stunning, radar technology-based applications. In fact, the shie …

Alessio Morale & the LibrePilot Team
Two robot implementations using the opensource LibrePilot firmware, originally aimed at powering drones





































