
Espositori 2021
- FASHION & WEARABLES
- INTERNET OF THINGS
- PRODUCT DESIGN
- 3D PRINTING
- 3D SCANNING
- ART
- ARTIFICIAL INTELLIGENCE
- BIOLOGY
- EDUCATION
- HACKS
- KIDS & EDUCATION
- OPEN SOURCE
- ROBOTICS
- MUSIC & SOUND
- ARTISANS & NEW CRAFT
- RECYCLING & UPCYCLING
- STEAM PUNK
- GAMES
- SCIENCE
- YOUNG MAKERS (< 18)
- FOOD & AGRICULTURE
- CIRCULAR ECONOMY
- AEROSPACE
- HOME AUTOMATION
- NEW MANUFACTURING
- STARTUP
- WELLNESS & HEALTHCARE
- ENERGY & SUSTAINABILITY
- FABRICATION
- INDUSTRIAL AUTOMATION
- RETROCOMPUTING
- DRONES
- CULTURAL HERITAGE
- VIRTUAL REALITY
Categoria "Robotics"
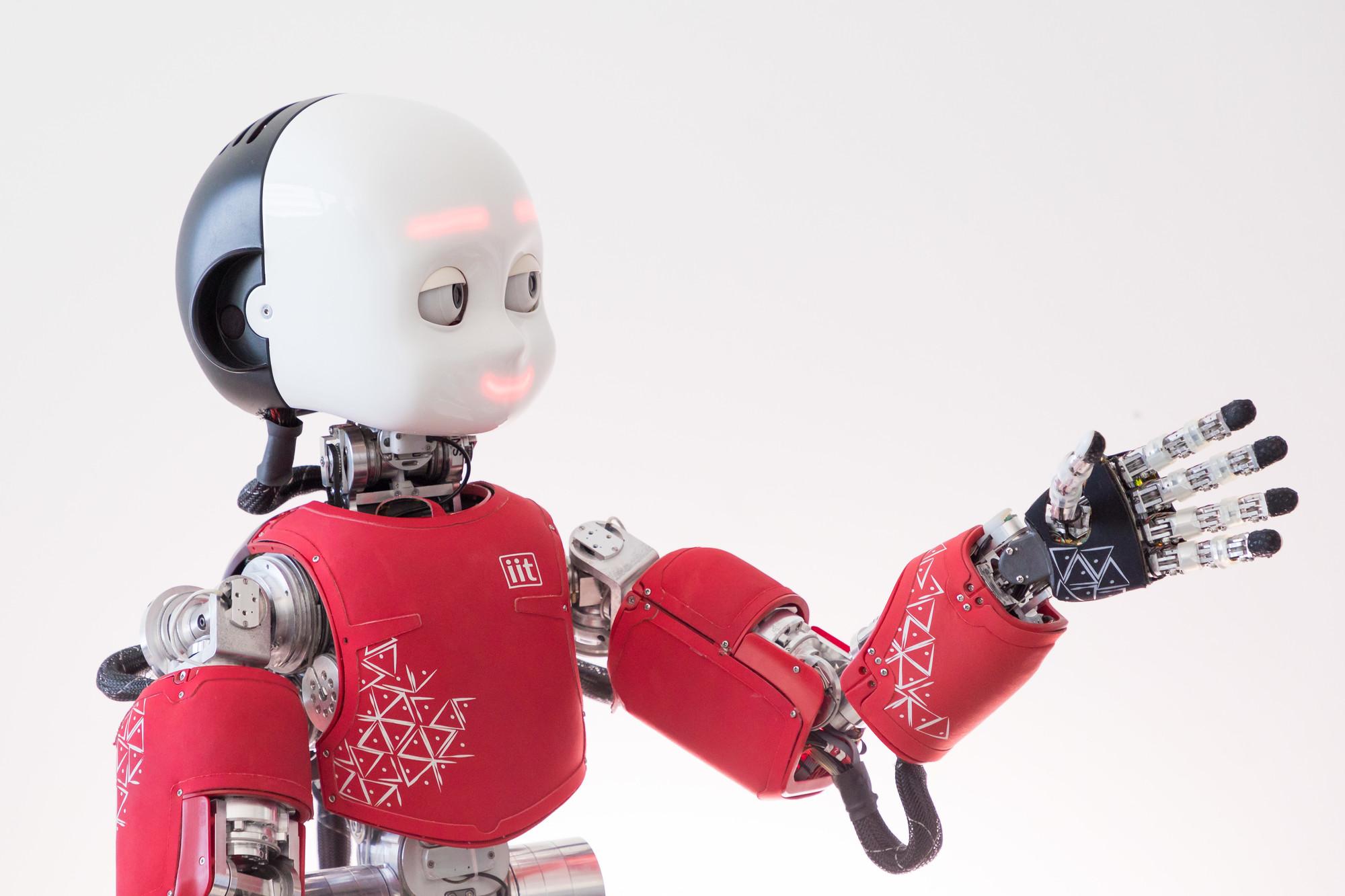
Robot next gen: anthropomorphic arms and quadrupeds for manipulating and exploring the real world.
Riuscirai a battere un robot a carte? Vieni a scoprire come studiamo l�interazione uomo-robot e mettiti alla prova!
Passive exoskeleton for back-support in industrial operations.

The IIT - SoftRobotics for Human Cooperation and Rehabilitation is located in Genoa at IIT Central Research Labs, but also has research facilities in Pisa (in collaboration with the Reserarch Center "E. Piaggio" of the University of Pisa), and in KmRosso area in Bergamo (in collaboration with the Intellimech Mechatronic Consortium). We also closely collaborate with researchers in IIT, in Pisa, at the German Aerospace Agency, the Arizona State University, the Universities of Rome and Siena, among many others.
PRISMA Hand II is a mechanically robust anthropomorphic robot hand. It is highly underactuated, as the 19 joints are driven by 3 motors via elastic tendons. Nevertheless, the hand can perform not only adaptive grasps but also in-hand manipulation.
HARMONY develops robotic mobile manipulation technologies for assisting staff in hospital environments.
KUKA Med is an anthropomorphic robotic arm used to assist physicians in different applications like rehabilitation and dental implants.
da Vinci Research Kit is a robotic system for minimally invasive surgery.
Obiettivi di OPT4SMART: offrire un framework teorico per risolvere problemi di ottimizzazione distribuiti; sviluppare librerie numeriche per reti cyber-fisiche
Il progetto PON-PlaCE mira a sperimentare nuove tecnologie per il monitoraggio e il riutilizzo ecosostenibile di piattaforme offshore dismesse
Vieni a scoprire le soluzioni robotiche per la manipolazione di oggetti deformabili come cavi e tubi sviluppate in REMODEL
�SLIM� is the Snake-Like robot for Inspection and Maintenance that explore the most dangerous and inaccessible areas of industrial plants

Una nuova generazione di robot collaborativi con l�obiettivo di supportare i lavoratori nelle loro attivit� sia in ambienti ostili e/o nella catena produttiva.
Mostreremo prototipi di pinze robotiche realizzate combinando materiali soft con attuatori magnetici e dispositivi in grado di ricreare sensazioni tattile in ambienti di VR/AR.
In questo progetto, verranno illustrate le metodologie allo stato dell'arte che il Politecnico di Torino sta sviluppando per costruire le fondamenta della conoscenza teorica e degli algoritmi che i robot del futuro, e pi� in generale i sistemi intelligenti, useranno per imparare autonomamente sugli oggetti, sull'ambiente e sul mondo.





































