
Espositori 2021
- FASHION & WEARABLES
- INTERNET OF THINGS
- PRODUCT DESIGN
- 3D PRINTING
- 3D SCANNING
- ART
- ARTIFICIAL INTELLIGENCE
- BIOLOGY
- EDUCATION
- HACKS
- KIDS & EDUCATION
- OPEN SOURCE
- ROBOTICS
- MUSIC & SOUND
- ARTISANS & NEW CRAFT
- RECYCLING & UPCYCLING
- STEAM PUNK
- GAMES
- SCIENCE
- YOUNG MAKERS (< 18)
- FOOD & AGRICULTURE
- CIRCULAR ECONOMY
- AEROSPACE
- HOME AUTOMATION
- NEW MANUFACTURING
- STARTUP
- WELLNESS & HEALTHCARE
- ENERGY & SUSTAINABILITY
- FABRICATION
- INDUSTRIAL AUTOMATION
- RETROCOMPUTING
- DRONES
- CULTURAL HERITAGE
- VIRTUAL REALITY
Risultati per TAG "Robotics"
Un robot pittore autonomo che realizza quadri ad acquerello realizzabile in casa con materiale facilmente reperibile o stampabile in 3D
A.R.A.C.H.N.E. � in grado di sondare terreni, mappandoli e diserbando le piante infestanti per riutilizzarle per la pacciamatura del suolo.
ADIUTOR � un dispositivo robotico per la riabilitazione degli arti superiori, progettato per la riabilitazione assistita direttamente a casa.
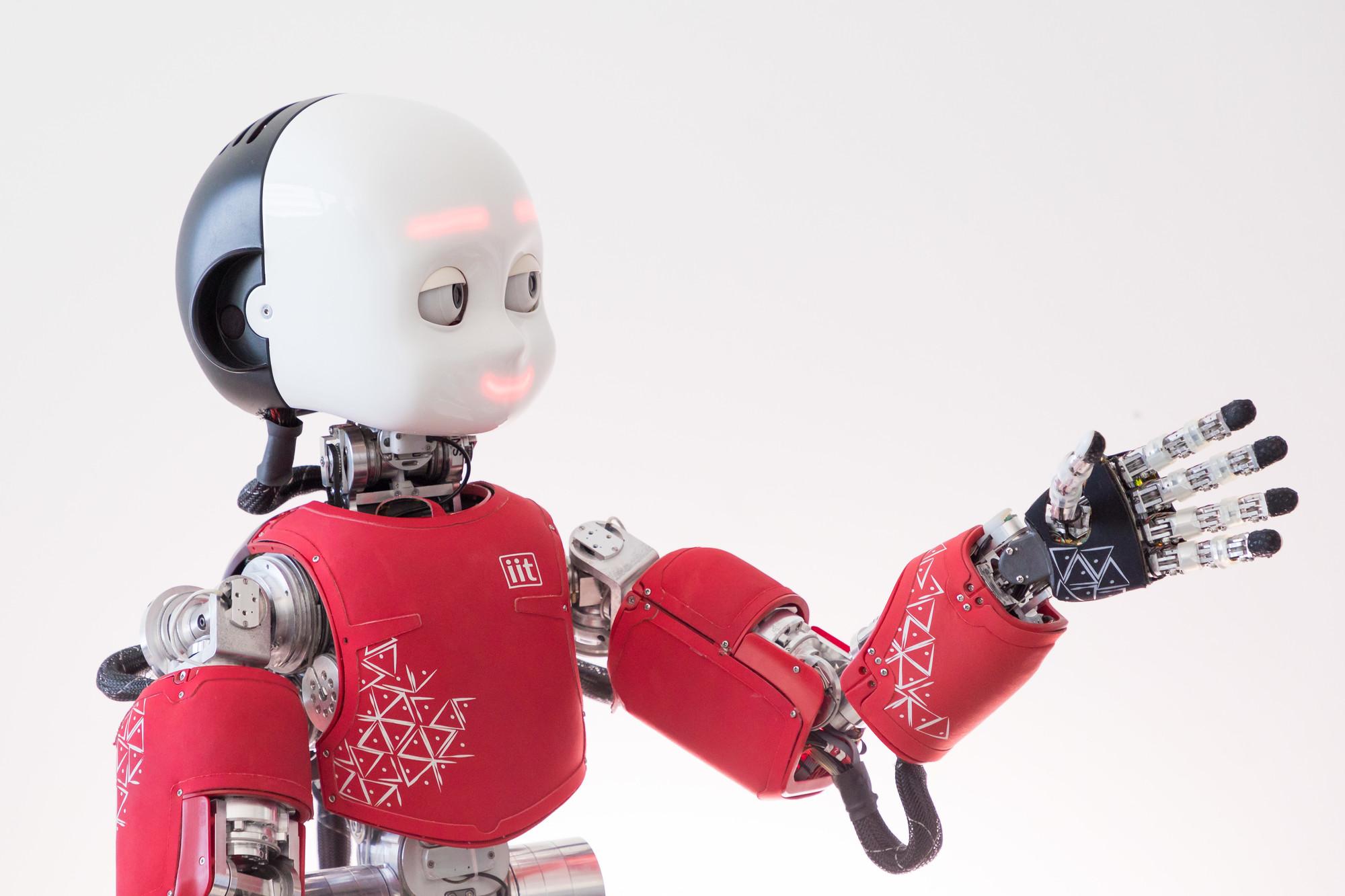
Robot next gen: anthropomorphic arms and quadrupeds for manipulating and exploring the real world.
Dispositivo automatico aeroportuale per portare bagagli e passeggeri dall'ingresso fino al banco del check-in, il passeggero sar� libero e rilassato
Tre musicisti automatici - bassista, percussionista, suonatore di glockenspiel - suoneranno insieme ad altri strumenti automatici e a un musicista "umano".
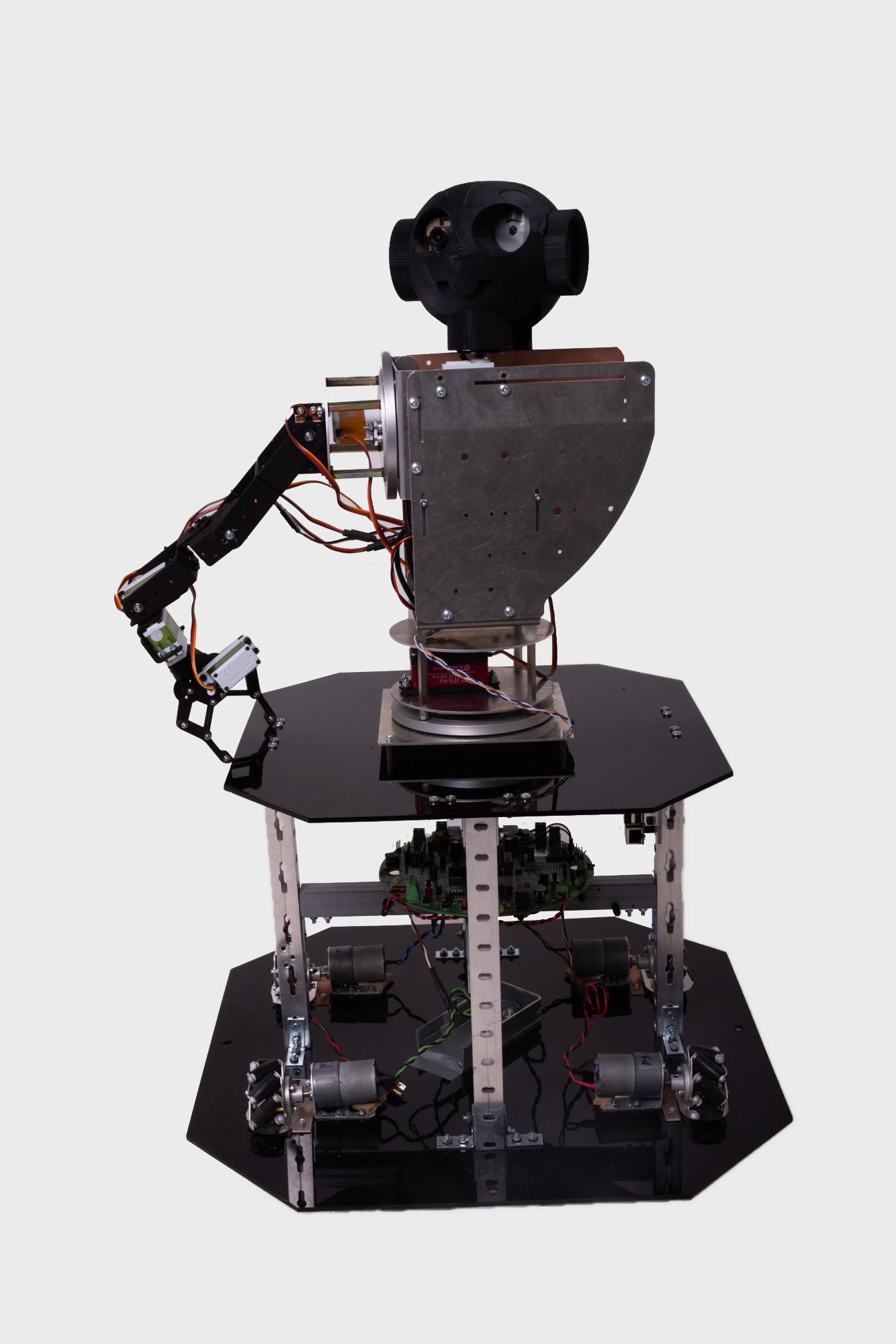
Il progetto � centrato su un Androide Collaborativo chiamato �Brother� , dotato di capacit� decisionali autonome e di interazione con il mondo esterno basate sul riconoscimento eventi attraverso l'utilizzo di tecniche di Intelligenza Artificiale. Brother � in grado di riconoscere la lingua dei segni italiana LIS traducendola in audio e in Braille.
Applicazioni di robot collaborativi basate sulla visione e sull�intelligenza artificiale per la manipolazione, il riconoscimento e la presa di oggetti.
It is a scrap built, a handmade, it educates the audience and the Project will be attractive to the audience due to how it functions.
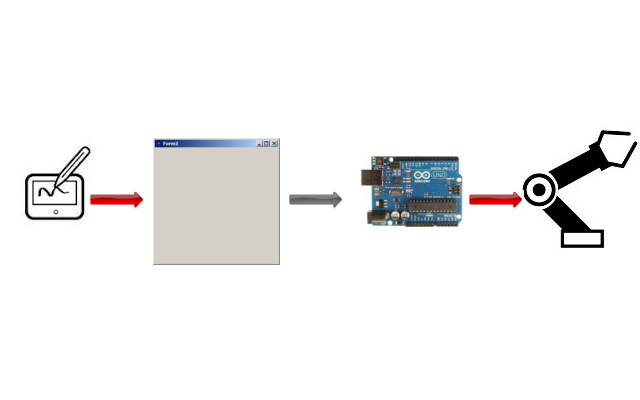
Braccione � un braccio meccanico di quasi 2 metri di lunghezza. E' realizzato con pochi servo e con uso estensivo di materiali di recupero. Braccione imita i movimenti di chi disegna sulla sua tavoletta grafica di controllo.
Carrozzella elettrica modificata per affrontare gradini o scale anche ripide in stabilit�, sicurezza e completa automazione, salvaguardando l�agilit� nell'uso normale.

Saperi&Co, coordiner� i progetti Sapienza alla Maker Faire Rome.
Riuscirai a battere un robot a carte? Vieni a scoprire come studiamo l�interazione uomo-robot e mettiti alla prova!
Mettendo insieme dati locali, l'Osservazione della Terra da satellite e l'Intelligenza Artificiale per misurare meglio la qualit� dell'aria che respiriamo.
CyberOrto � un sistema che permette di gestire un piccolo orto in maniera del tutto automatizzata. Deciderai, attraverso un'applicazione, quali ortaggi piantare e lui provveder� alla loro coltura avvisandoti quando saranno pronti per la raccolta.
Progettazione di un rover autonomo secondo Project Red: la metodologia di lavoro, i software, la navigazione autonoma e il prototipo.
Protesi di avambraccio interamente stampata in 3D a controllo elettromiografico.
ENDRIU � un robot mobile autonomo e modulare per la sanificazione attraverso luce ultravioletta e filtrazione elettrostatica.
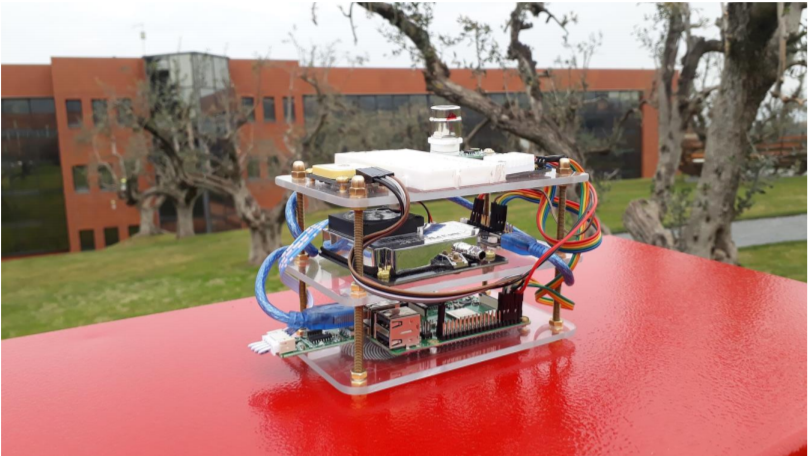
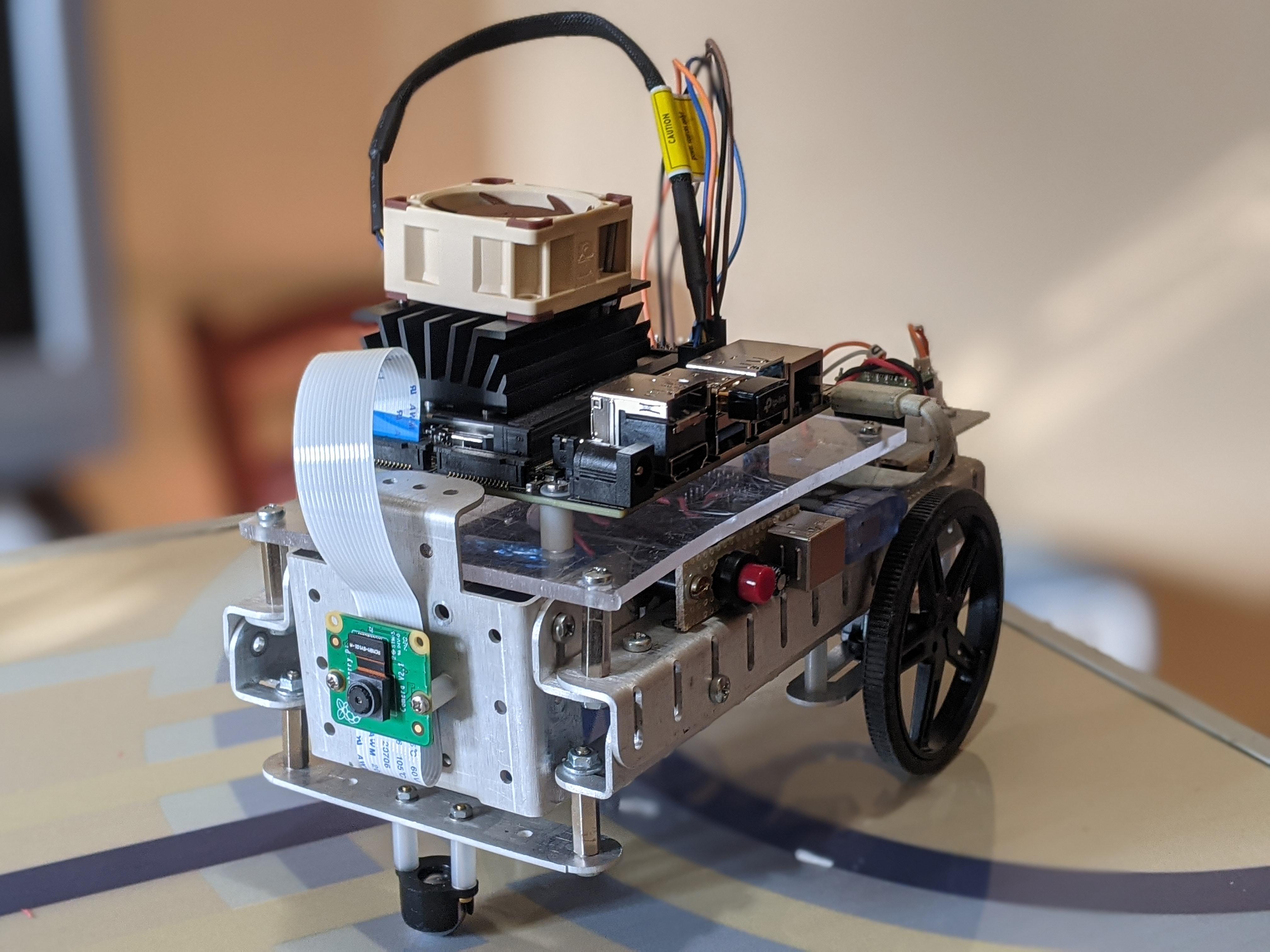
Erwhi Hedgehog � un piccolo robot ROS open source che � capace di effettuare SLAM e visione artificiale.
Passive exoskeleton for back-support in industrial operations.
Si parte dalla base terra, in senso metaforico ma anche materiale. Il Progetto diventa il teatro di un�operazione transdisciplinare che oscilla tra le pratiche pi� radicali dell�agricoltura e le tecnologie pi� avanzate.
Hannah: un sistema per il posizionamento e il controllo automatico dell�integrit� delle mascherine facciali basato su deep learning.

The IIT - SoftRobotics for Human Cooperation and Rehabilitation is located in Genoa at IIT Central Research Labs, but also has research facilities in Pisa (in collaboration with the Reserarch Center "E. Piaggio" of the University of Pisa), and in KmRosso area in Bergamo (in collaboration with the Intellimech Mechatronic Consortium). We also closely collaborate with researchers in IIT, in Pisa, at the German Aerospace Agency, the Arizona State University, the Universities of Rome and Siena, among many others.
Our research aims to improve human-robot collaboration using new technologies such as augmented reality and human motion tracking.
Easy-Task � una macchina che facilita la creazione delle vostre bevande da semplici succhi fino ad arrivare a cocktail
PRISMA Hand II is a mechanically robust anthropomorphic robot hand. It is highly underactuated, as the 19 joints are driven by 3 motors via elastic tendons. Nevertheless, the hand can perform not only adaptive grasps but also in-hand manipulation.
HARMONY develops robotic mobile manipulation technologies for assisting staff in hospital environments.
KUKA Med is an anthropomorphic robotic arm used to assist physicians in different applications like rehabilitation and dental implants.
da Vinci Research Kit is a robotic system for minimally invasive surgery.
La mini Giungla Band, � una mini orchestra di quattro elementi. Gli animali robot, suonano con lo spartito musicale in formato MIDI.
Musical robots and humans form a band and play original musical instruments. Instruments are a mixture of electronic and traditional musical instruments.

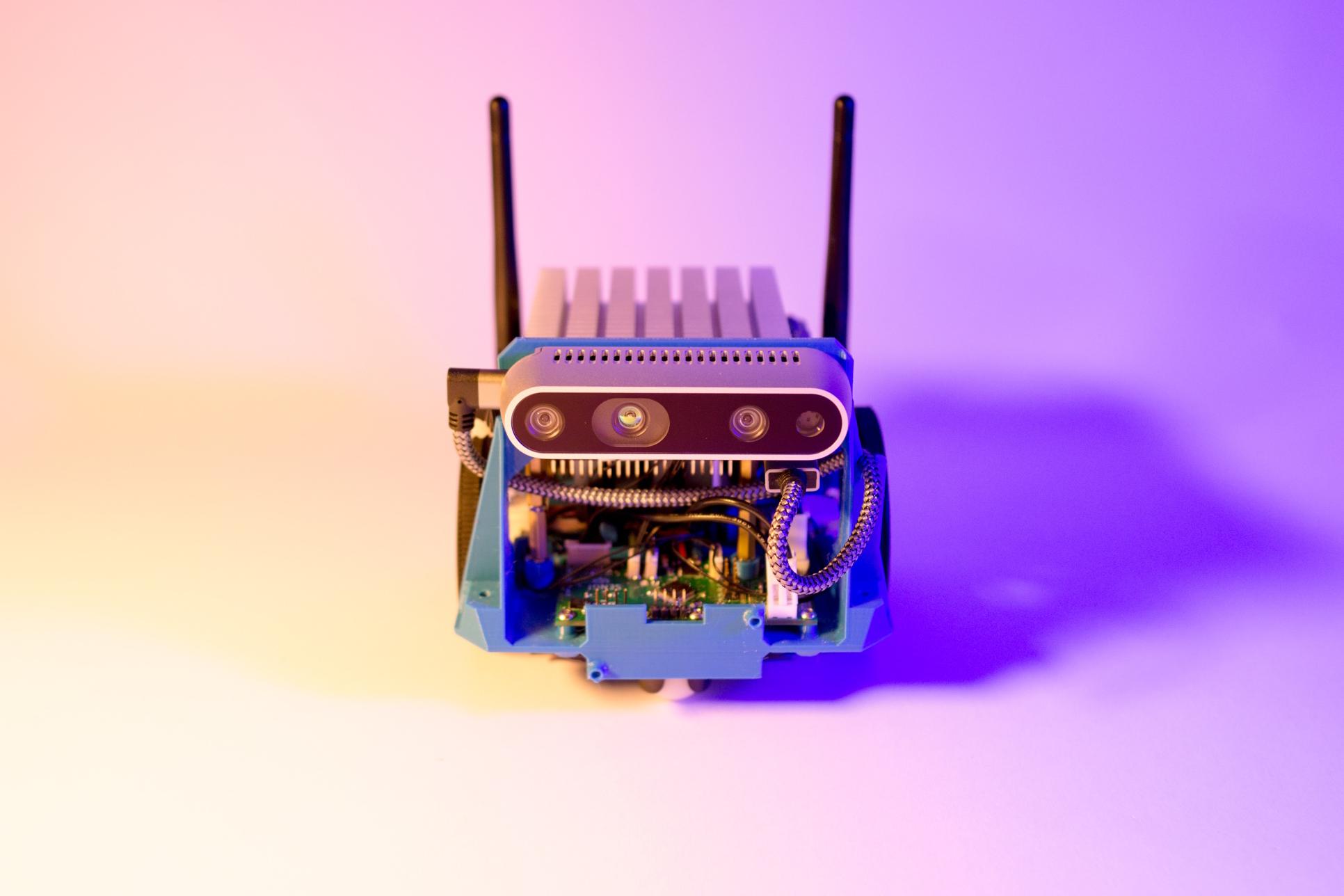
Nanosaur � il pi� piccolo robot costruito su una NVIDIA Jetson Nano. Il robot � progettato per essere semplice da costruire in casa, avendo a disposizione una stampante 3D, e con pochi altri componenti � possibile vederlo in azione.
L'installazione sonora nasce dalla necessit� di riflettere sull�isolamento e la disconnessione emotiva di cui oggi facciamo esperienza a causa dell�emergenza sanitaria.
Our project is based on the wireless transmission of signals using the principle of radio transmission whose initiator was Nikola Tesla.
Obiettivi di OPT4SMART: offrire un framework teorico per risolvere problemi di ottimizzazione distribuiti; sviluppare librerie numeriche per reti cyber-fisiche
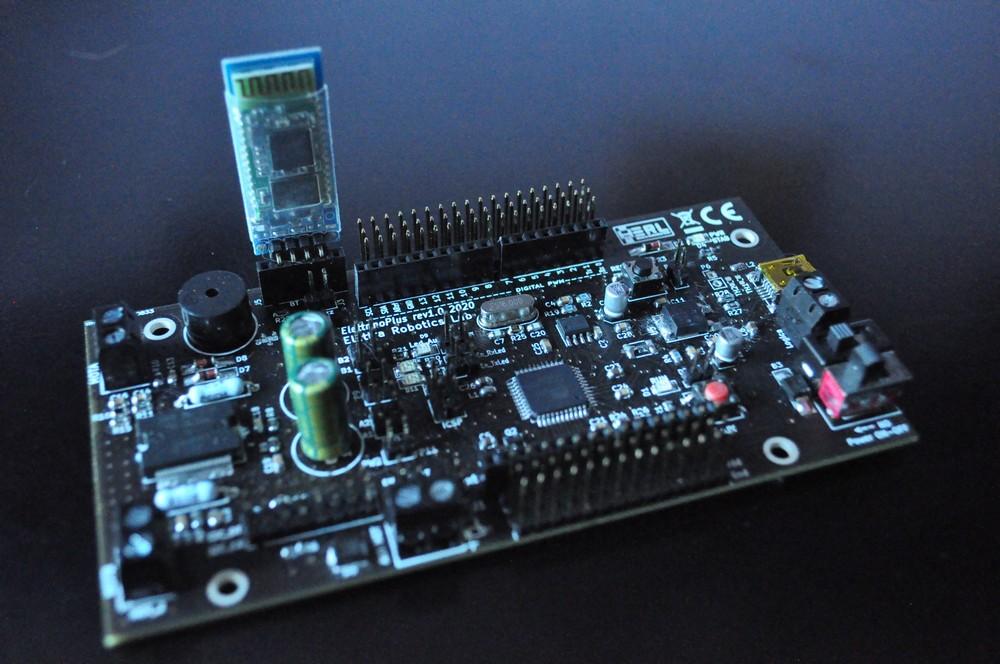
ElettrinoPlus � una scheda di prototipazione per la robotica amatoriale con elevate prestazioni, compatibile con l'ambiente Arduino.
Una stampante a getto d'inchiostro � stata strasformata in un plotter aggiungendo solo una scheda Arduino UNO. Con opportune modifiche � possibile trasformarla in un taglia vinile, cartone, carta, o pelle.

PoopBot � un robot � che fonde tecnologia, kawaii e divertimento per tutti!
Il progetto PON-PlaCE mira a sperimentare nuove tecnologie per il monitoraggio e il riutilizzo ecosostenibile di piattaforme offshore dismesse
PVCorobot � un robot collaborativo autocostruito con materiali di recupero e a basso costo, controllato da un PLC Siemens S71200 a seguito delle informazioni in tempo reale ricevute da una rete neurale in linguaggio Python installata su una GPU Jetson Nano.
REaD-EV3 � un progetto di robotica educativa a distanza basato su Lego� MindStorms� EV3 e sulla piattoforma Open Roberta Lab
Vieni a scoprire le soluzioni robotiche per la manipolazione di oggetti deformabili come cavi e tubi sviluppate in REMODEL
Due squadre RoboCup di robot completamente autonomi si confrontano disputando partite di calcio 5vs5. L'iniziativa incoraggia la ricerca nell'intelligenza artificiale e nella robotica.
robot al servizio sociale e per la ristorazione
Autonomous Mobile Robot made in the industrial standard and integrated Artificial Intelligence as an additional safety element
Lambda � un robot polifunzionale pensato per muoversi in ambiente domestico.
This project concerns a robot capable of interpreting and performing signs in the Italian Sign Language.
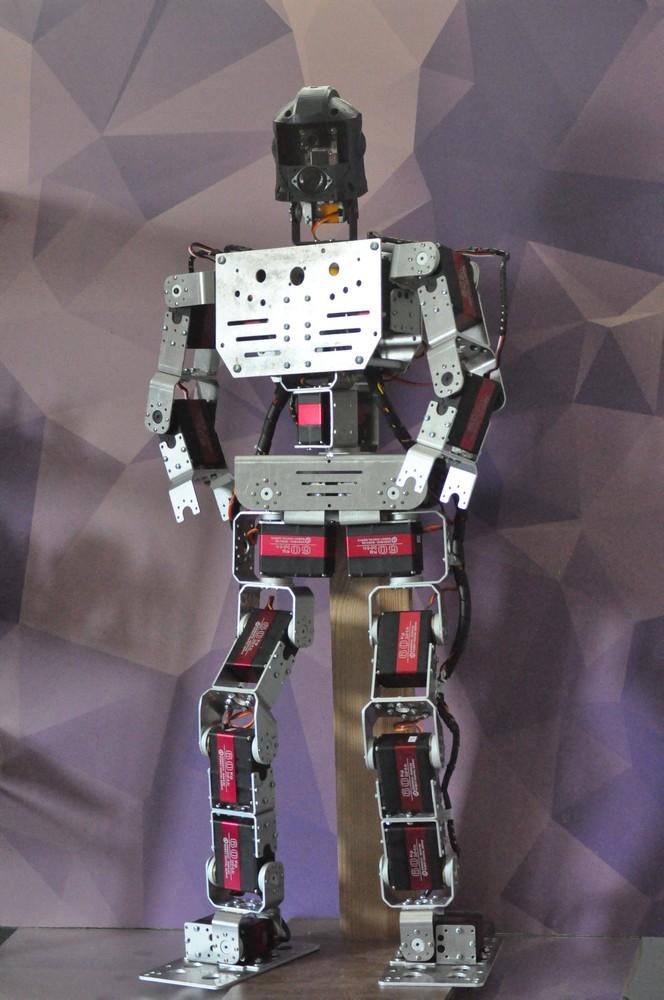
Uranus � un robot umanoide a 22 dof sviluppato da ERL con l'obiettivo di raggiungere gli 80 cm di altezza, superando quindi il limite dei precedenti progetti.
Sakrim � un dispositivo costituito da un braccio robotico che gioca autonomamente a tris contro un avversario umano.
Un piccolo e versatile robot basato su ROS e sviluppato per sperimentare e testare algoritmi di visione artificiale.
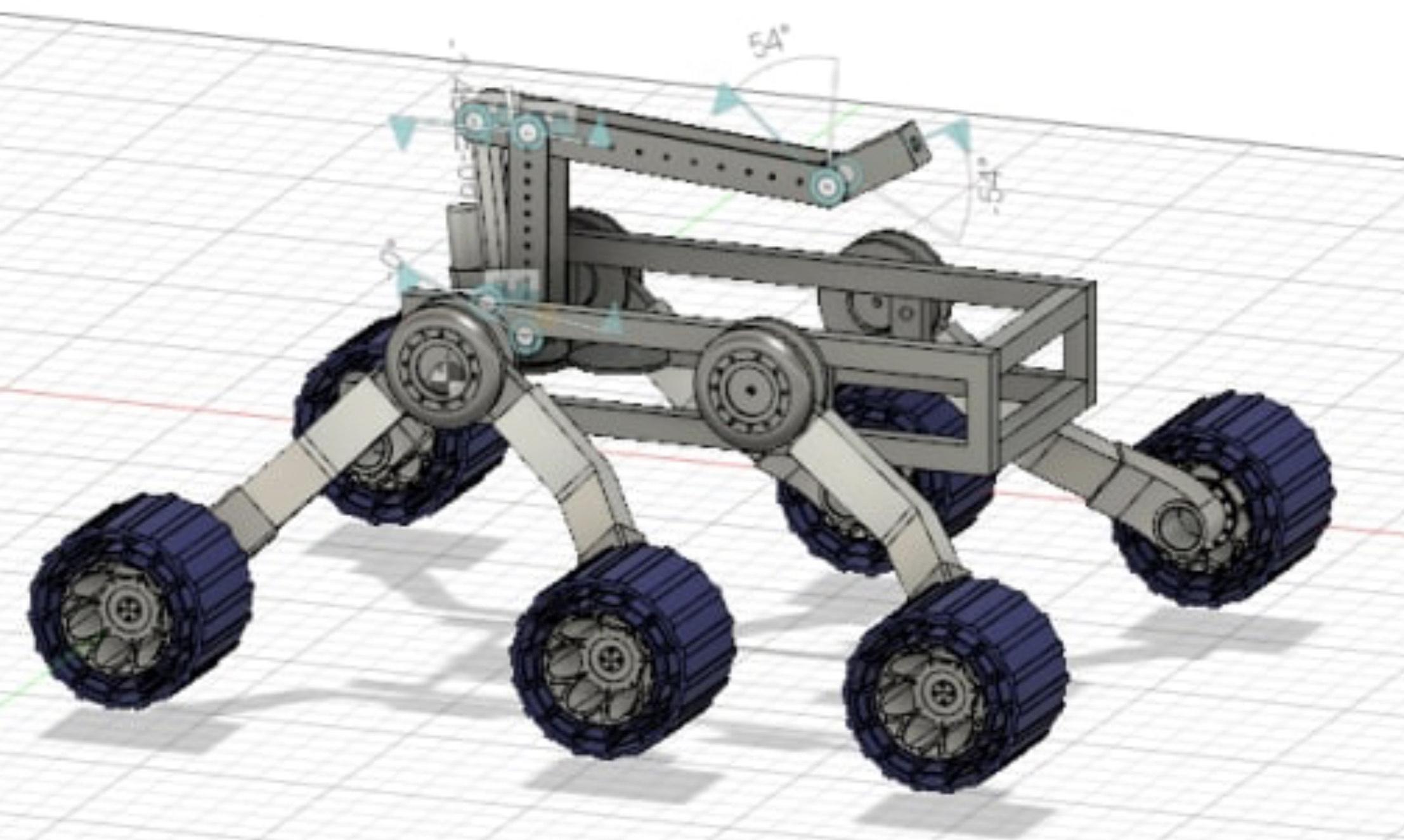
Progettare e costruire sistemi robotici simili a quelli usati per l�esplorazione spaziale
Scuderia Tor Vergata � il Team Formula SAE ufficiale dell'Universit� di Roma Tor Vergata, con sede a Roma, Italia.






































