
Espositori 2018
- HOME AUTOMATION
- ROBOTICS
- YOUNG MAKERS (< 18)
- OPEN SOURCE
- 3D PRINTING
- DRONES
- EDUCATION
- FABRICATION
- HACKS
- NEW MANUFACTURING
- SCIENCE
- ENERGY & SUSTAINABILITY
- ART
- INTERNET OF THINGS
- MUSIC & SOUND
- RECYCLING & UPCYCLING
- KIDS & EDUCATION
- ARTISANS & NEW CRAFT
- CULTURAL HERITAGE
- GAMES
- WELLNESS & HEALTHCARE
- FASHION & WEARABLES
- FOOD & AGRICULTURE
- BIOLOGY
- 3D SCANNING
- AEROSPACE
- STEAM PUNK
- ARTIFICIAL INTELLIGENCE
- ARDUINO
- CROWDFUNDING
Risultati per TAG "Robotics"

Ben P Bacon & collaboration of Blino
Taking your EEG brain signals and it up to you to pump water from one tank to another. Come play.

M.A.R.I.O. Team. ( Michela Andreotti, Alessia Di Domenico, Andrea Ripiccini, Irene Marucci, Oriana Iannotti.) Scuola: Liceo Scientifico Sandro Pertini Ladispoli. Classe 5B
MARIO è un robot che assiste gli anziani o chiunque abbia lievi problemi cognitivi, interagendo con loro e controllando l'abitazione

POLIMI DEIB
The European Union funded project EDEN2020 aims to develop the gold standard for one-stop diagnosis and minimally invasive treatment in neurosurgery.
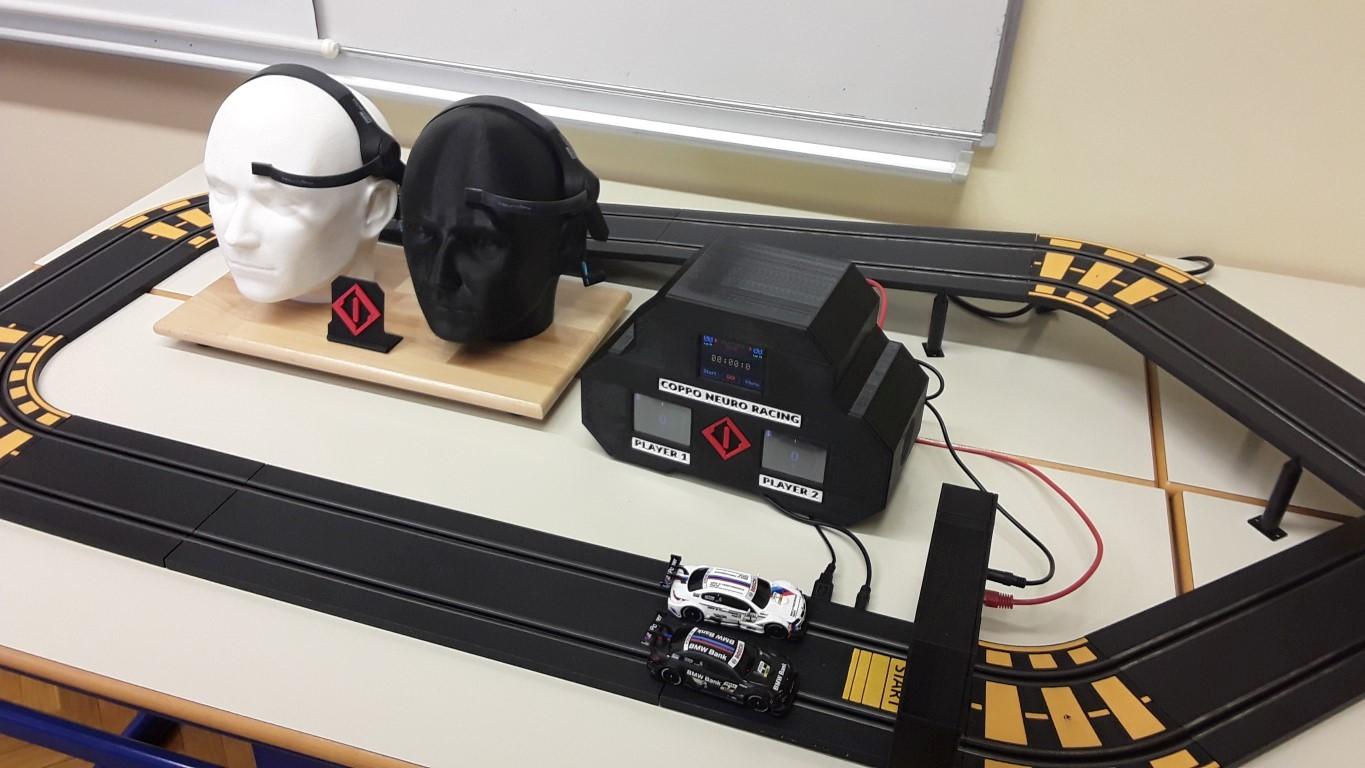
SM Pietro Coppo Isola
Gli alunni dell'istituto Pietro Coppo Isola Slovenia presentano i progetti realizzati durante l'anno scolastico o come progetto di maturità professionale.
HiPeRT Lab (Paolo Burgio, Massimiliano Bosi, Francesco Gatti)
"Bud" is 1/10 scale prototype of an autonomous vehicle designed for racing competitions.

Fab Lab class with Mr Zoffoli, Marymount International School Rome
Un drone avanzato e autonomo dotato di sistema anti-collisione e uno di sorveglianza. Fa uso di due telecamere ottiche, una telecamera termica radiometrica ed una telecamera 3D per poter compiere una varietà di missioni, in particolare nell'ambito della difesa.

Giuseppe Massaria, Antonio Idà
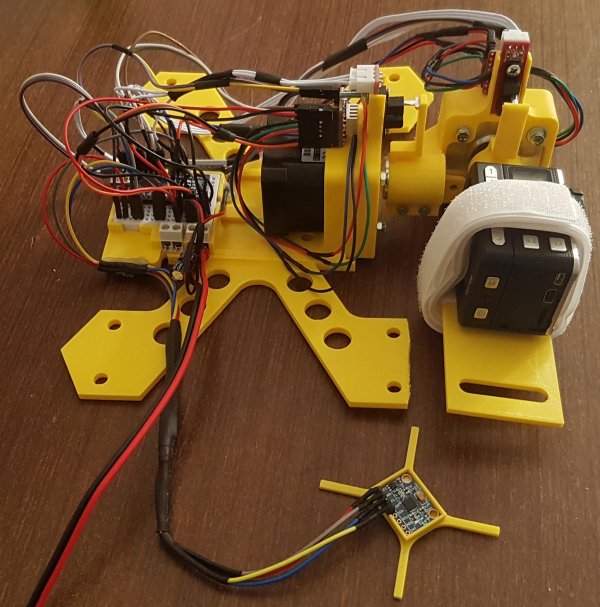
ALAN-1 è un robot della categoria “Rover“, che integra in se molteplici funzioni avanzate:
• Streaming camera
• Riconoscimento facciale
• Tracciamento oggetti nello spazio intorno a se
• Funzione segui linea in un percorso
• Attraverso i sensori infrarossi, il robot è in grado di muoversi su una superficie senza cadere rilevando la mancanza della stessa.
• Funzione evita ostacoli mediante sensore ad ultrasuoni
• Movimento in modalità automatica
• Movimento in modalità manuale tramite interfaccia grafica GUI (custom)
• Misurazione livello batteria mediante modulo ADC .
• Funzioni vocali con mini speaker
• Display LCD 20x4
• Custom GUI (interfaccia grafica)
• Sistema multi thread
• Base di ricarica wireless (costruita appositamente per il robot)

Lionel Gulich, Victor Klemm, Nicola Küng, Dominik Mannhart, Alessandro Morra, Corentin Pfister, Ciro Salzmann, Marcus Vierneisel, Florian Weber
We introduce a novel type of mobile robot combining both legs and wheels to maneuver agile and overcome obstacles.

FITH S.r.l.s.
Il sistema consiste in un elevatore composto da tre attuatori alimentati incrnte continua che permettono il solevamento di aerei ed elicotteri.
Roberto D'Amico
B4 è un Robot basato su ROS, utilizza un Microsft Kinect per mappare l'ambiente, interagisce con sensori esterni.

2nd Vocational High school of Crete, Computing course
CanBuddy is an innovative robotic metal recycler that drives through to collect metal cans. Smart, skinned (sport team, company, game), informative (news, weather e.t.c.) can operate autonomously or programmed over the air. Advertisement and dispensing customisation capabilities.
Classe quarta Ipsia "IIS Gae Aulenti" - Biella
Il nostro Robot (“Cartesio”) è in grado di interagire con gli utenti umani vocalmente, riconoscere oggetti, visi, cercare informazioni su internet per ampliare la propria conoscenza, programmarsi “autonomamente” per apprendere nuovi concetti e nuove informazioni.

Conrad Electronic
Diventa maker con la pratica!
Conrad Electronic si presenta alla Maker Faire di Roma come partner di tutti i tekkies e makers.
Vivi presso il nostro stand ent …

Krzysztof Kozlowski, Wojciech Kowalczyk, Joanna Piasek, Krzysztof Lakomy
Control of cooperating mobile robots in structured environment with obstacle avoidance.

Colegiul Tehnic Gheorghe Cartianu, students in grades 9 and 11
Through this social project, within the national program "Educlick 1/2017: We Reuse IT Equipment for Education and Solidarity!" we have obtained 15 computers that are used by students from the technical profile, electronics and automation.
ITS MECCATRONICO VENETO, SEDE DI VICENZA, ITS 2016-2018 GRUPPO 5
Il Dispenser Automatico di Medicinali consiste in un carrello con un sistema meccatronico installato al suo interno. L'obiettivo del progetto è quello di aiutare gli infermieri nell'erogazione delle pastiglie.

Specchiarelli Antonio, classe 4^A - Automazione, IIS "Primo Levi" - Vignola (MO)
Doctor Robot è stato progettato per essere impiegato negli ospedali, nelle case di cura e anche nelle abitazioni private, per la consegna puntuale dei farmaci ai pazienti.
Dimitris Alimisis, Dimitris Loukatos, Michele Moro, Emanuele Menegatti
Project eCraft2Learn: Children learn to make their own robots! Educational robotics beyond “black boxes” and pre-fabricated robots!

FITH S.r.l.s.
"ElectricSave" è il nuovo mezzo di salvataggio studiato per i bagnini, completamente elettrico, più veloce, efficiente e sicuro.
Giovanni di Dio Bruno
ERWHI, Eyed Robot With Human Interaction, è un piccolo robot mobile open source.

Giovanni di Dio Bruno
ERWHI Hedgehog is the smallest open source robot in the world with machine learning and autonomous navigation.
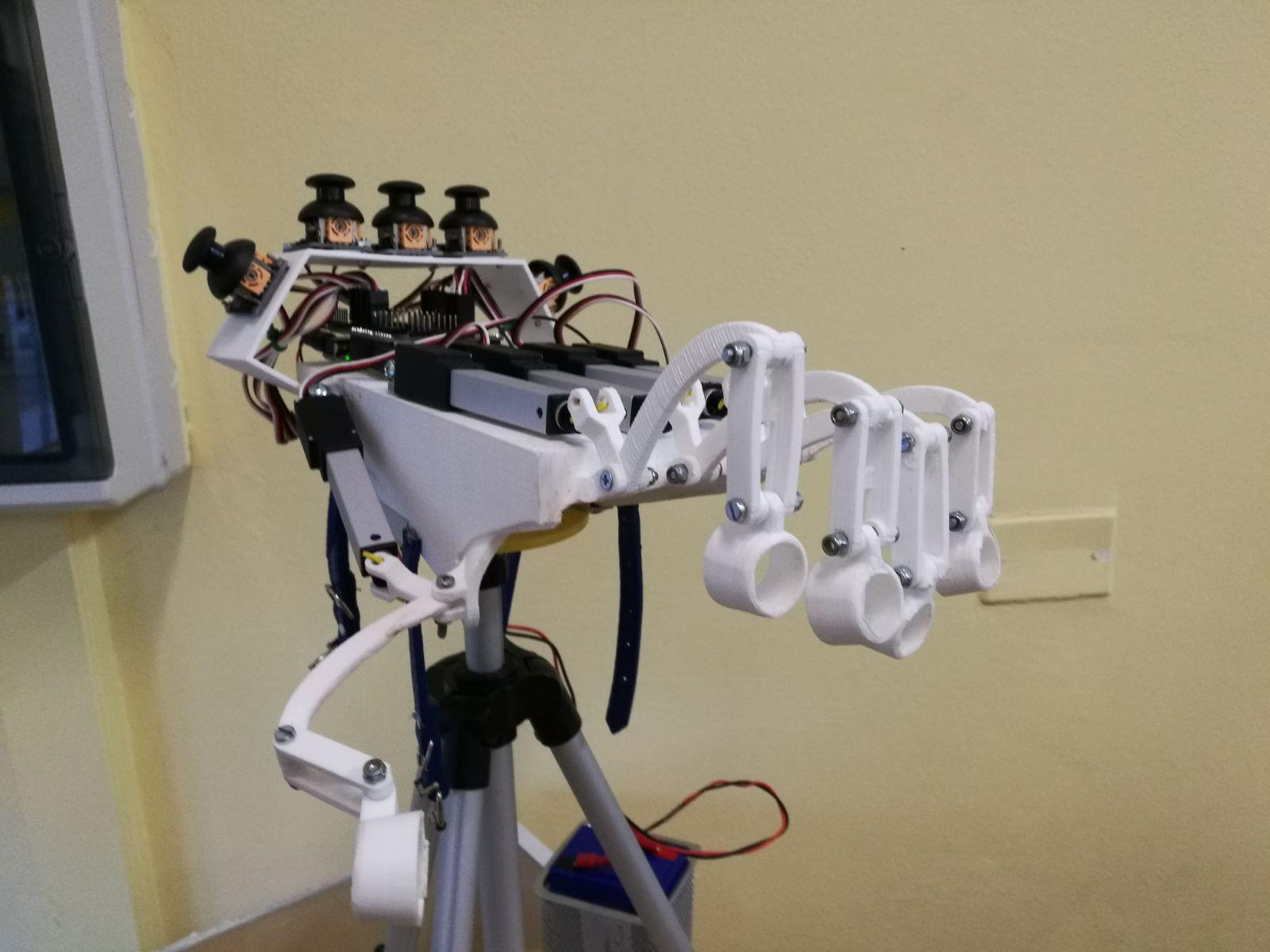
CLASSE IV ITT " RITA LEVI MONTALCINI" ARGENTA (FE)
Dopo aver realizzato la parte meccanica mediante stampante 3D con filamento PLA, grazie a 5 joystick aziona altrettanti attuatori lineari che grazie ad un sistema di leveraggi, movimenta le articolazioni delle falangi stimolando una ripresa motoria.

Maura Mengoni, Luca Giraldi, Andrea Generosi
Evoque è un tunnel, un passaggio, uno spazio fluido, osmotico, multisensoriale capace di creare una connessione emotiva ed affettiva con un brand. Grazie all'integrazione delle più avanzate tecnologie per l’analisi di prossimità, il riconoscimento di comportamenti ed emozioni, l’intelligenza artificiale e il digital signage Evoque crea una relazione empatica con il visitatore. Le luci, i colori, le musiche, i profumi ed i contenuti multimediali cambiano continuamente in base allo stato emotivo di chi lo attraversa. Il touchpoint esperienziale costruisce lo storytelling del brand combinando elementi fisici e digitali e sfruttando la stimolazione multi-sensoriale per attrarre, catturare e coinvolgere il cliente in un percorso emozionale di avvicinamento e conoscenza del brand e dei suoi prodotti. E’ la prima soluzione che realizza una strategia omnicanale TO BE DIGITAL attraverso la matericità e fisicità dei suoi apparati tecnologici.

Associazione di Promozione Sociale Sinergie
Filiera della seta: innovazione e tecnologia nella produzione del filo di seta per manufatti artigianali "made in Italy".

Dipartimento di Fisica Sapienza Università di Roma & Fondazione Mondo Digitale
Scuola di Fisica 4.0 con Arduino e Smartphone, promossa dal Dipartimento di Fisica di Sapienza nell’ambito del Piano Lauree Scientifiche, e svolta presso il FabLab InnovationGym della Fondazione Mondo Digitale. Tre giornate dedicate alla programmazione e alla fabbricazione digitale. Il corso è finalizzato alla realizzazione di kit in grado di effettuare e dimostrare esperimenti di fisica, oltre che avvicinare gli insegnati alla programmazione e alla prototipazione rapida. Ogni anno a settembre si svolge il corso che porterà alla luce diversi manufatti, anche quest’anno abbiamo il piacere di organizzare questa iniziativa, sicuri che anche questa edizione produrrà degli oggetti interessanti.
Horizon
questo dispositivo usa un anello di reazione chiuso e un filtro kalman per pulire i dati in arrivo dai sensori

AI and Robotics Lab - Politecnico di Milano
Giocare con robot autonomi in modo fisico e' ora possibile per tutti, anche per persone con disabilita'.

Giovanni Saggio, Mariachiara Ricci, Vito Errico, Antonio Pallotti, Franco Giannini, Carla Cenci, Mauro D'Ambrosi, Marco D'Ambrosi, Donato D'Ambrosi, Sveva Viesti, Alessandro Pauciulo
Un guanto sensorizzato ed una mano meccanica antropoforma per uno strumento che consente di operare a distanza in sicurezza.
Chiunque, indossando il guanto sensorizzato, può agire a distanza muovendo la mano antropomorfa.

TheEngineRoom/EMAROlab, Università di Genova
HRI+ fornisce una possibile visione di futuro in cui le persone interagiscono e collaborano con robot.
Scuola di Robotica
Il futuro dei contest robotici: hackaton sugli umanoidi per appassionare i giovani a scienza, tecnologia e innovazione mediante un uso sociale della robotica
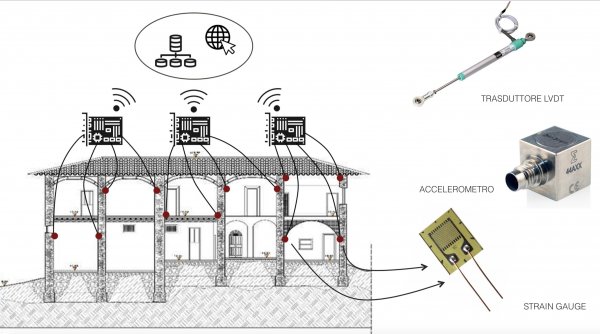
Donato Abruzzese, Claudio Greco, Gaetano Marrocco, Andrea Micheletti, Alessandro Tiero
An innovative system for real-time wireless monitoring of the stress state in structural elements of new and existing buildings

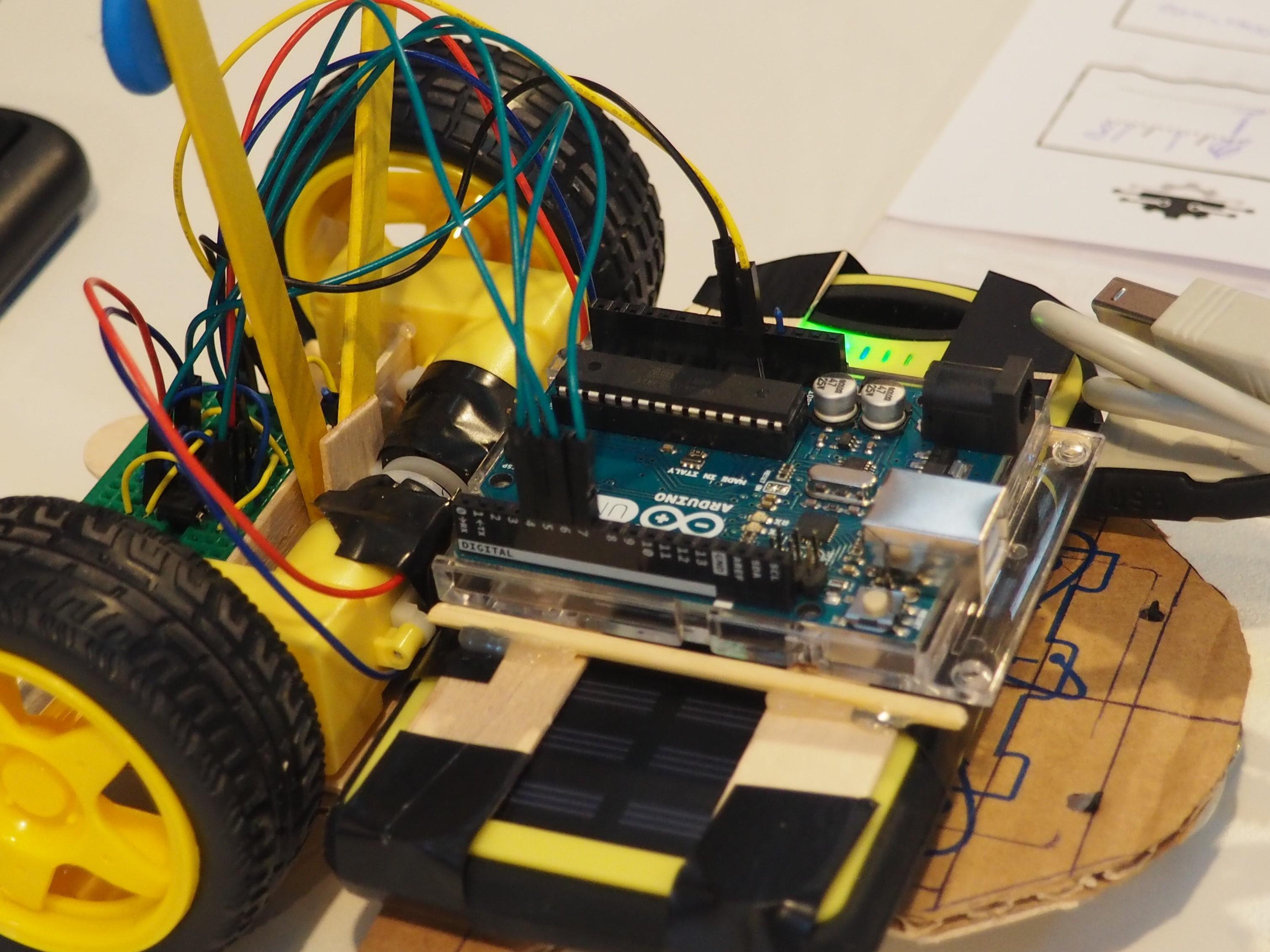
IIS Vittorio Veneto - "Città della Vittoria", nome del team: ToioRobot
Sistema di controllo informatizzato dell'inquinamento dei fiumi, monitoraggio dei dati (con grafici e tabelle) e gestione delle anomalie.

Squadra TIGRI, Istituto Polispecialistico "San Paolo" di Sorrento
Cassaforte con apertura comandata dal robot NAO tramite comando vocale e riconoscimento facciale.
Milovan Medojevic, Milana Medojevic, Danilo Nikolic, Milos Milasinovic, Andrej Katin
Lego, factory, automation, industry 4.0, IoT, manufacturing, press, compressors, conveyors, robotic arm, energy efficiency and management, data aquisition, simulation, optimization, modeling, education, students, practical example, practical learning.
Giancarlo Pellis, Stefano Gustin
Motorizzazione con moto roto-traslatorio al ginocchio di un Esoscheletro progettato da TC che riproduce la cinematica dell’arto inferiore
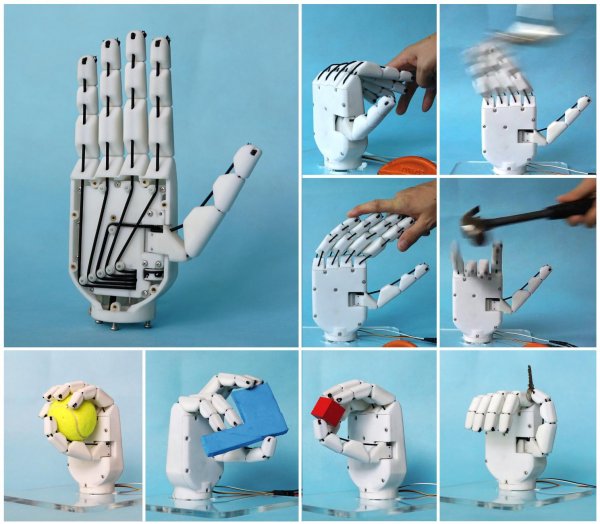
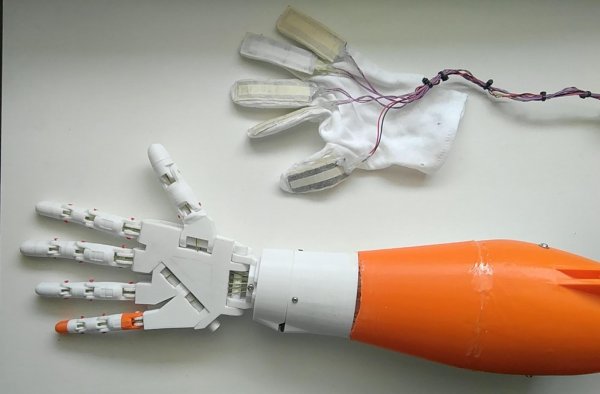
Fanny Ficuciello, Huan Liu, Satwinder Saini, Andrea Fontanelli, Bruno Siciliano
MUltifunctional Smart HAnds: novel insight for new technological insight for mini-invasive surgical tools and artificial anthropomorphic hands

OpenMaker is aEuropean Project financed by the European Programme Horizon 2020
OpenMaker mette in rete innovatori, makers, imprenditori della manifattura, ricercatori e appassionati di tecnologie, favorendone la collaborazione diffusa. Attraverso opportunità di ispirazione, networking, conoscenza e finanziamento per lo sviluppo di idee e prototipi innovativi, OpenMaker accelera il passaggio verso la manifattura 4.0.

Mauro Soligo
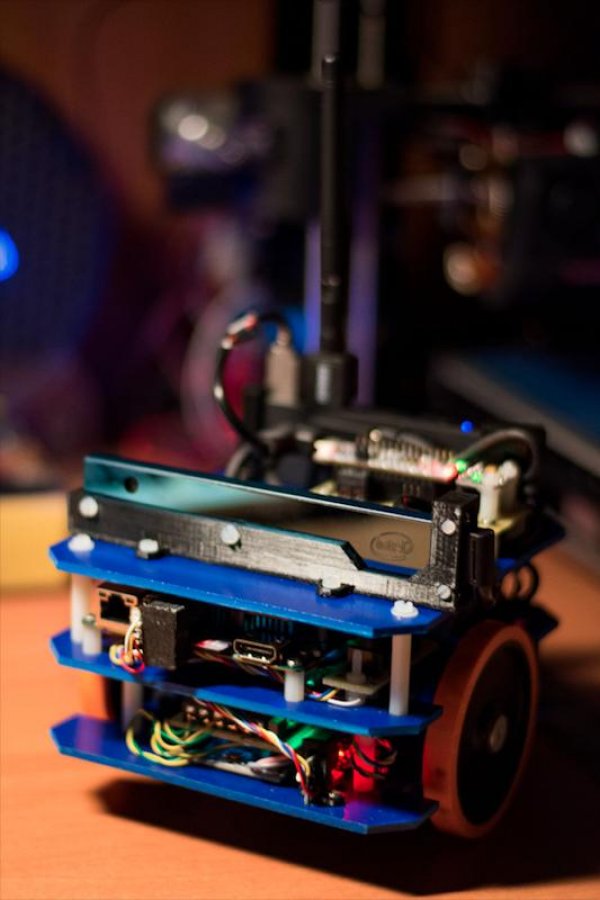
Plutarco robot's is a continuous development platform for robotic research in outdoor environment.
Marco De Gregorio
Braccio robotico Open Source con diverse funzioni. Potrai muoverlo con la tua stessa mano con un guanto apposito.
Silvia Rossi, PRISCA Lab
Applicazioni di Robotica e Intelligenza Artificiale per l'Assistenza

REGIONE LAZIO
La Regione Lazio porta a Maker Fair le nuove idee dei creativi del Lazio.
36 progetti e prototipi, scelti attraverso una call per startup, pmi, maker e innovat …

Niklas Sallali
Rhex è un robot esapode open source costruito per sperimentare ed imparare con concetti robotici.

AI and Robotics Lab - Politecnico di Milano
I robot possono mostrare emozioni anche senza volto. Emozione e un carattere rendono i robot e gli oggetti piu' interessanti.
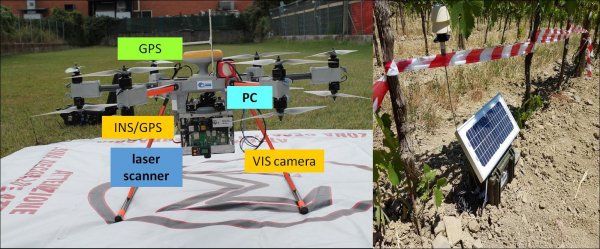
Beniamino Gioli, Piero Toscano, Alessandro Matese, Filippo Di Gennaro, Andrea Berton Federico Carotenuto, Alessandro Zaldei, Carolina Vagnoli
Un nuovo approccio per l’agricoltura di precisione si basa sulla robotica, in cui una piattaforma tecnologica (drone o un rover terrestre) può prendere decisioni autonome basandosi sul contesto, come riconoscere una pianta da sottoporre ad un trattamento, o ricostruire la geometria dei filari per potersi muovere al suo interno.
Per questa applicazione abbiamo impiegato tecnologie basate su sensori low-cost derivati dal segmento automotive, quali laser scanner e sensori ottici. Verranno mostrate alcune soluzioni tecnologiche (stazione agrometeorologica low cost Agroduino), una piattaforma UAV ed un insieme di sensori laser ed ottici.
Liceo scientifico statale "Bruno Touschek" Grottaferrata - Roma
Progetti con Arduino:
Due robot che giocano autonomamente a calcio
Un robot seguiluce
Un sonar che visualizza ostacoli
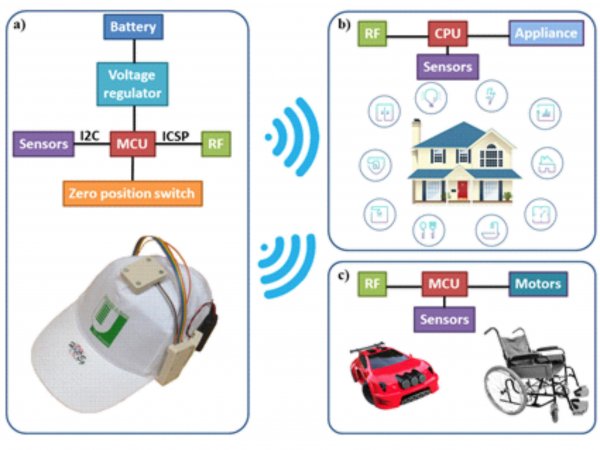
Giovanni Saggio, Vito Errico, Mariachiara Ricci, Franco Giannini, Carla Cenci
A sensory headwear allows the human head acting like a joystick.

Sony
Alla Maker Faire di quest'anno, il team di Sony Semiconductor Solutions Corp e Sony Developer Program presentano lo sviluppo della nuova scheda IoT Spresense. …
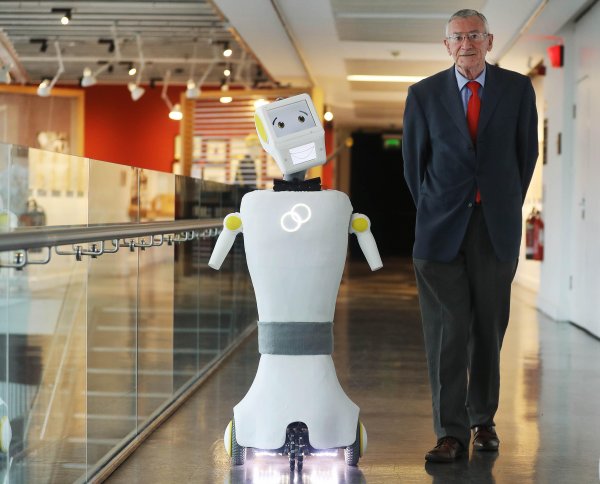
Robotics And Innovation Lab (Trinity College Dublin)
Stevie is a social robot, created as a general purpose research platform for robotics and artificial intelligence applications.

Antonio Ianiero
Thaumachines - Tecnologie per lo stupore.
Un'esposizione di macchine che fanno cose sorprendenti per chi le guarda.

The Raspberry Pi Foundation
Inspire your inner inventor and learn what you can do with a Raspberry Pi!






































