
Espositori 2017
- DRONES
- EDUCATION
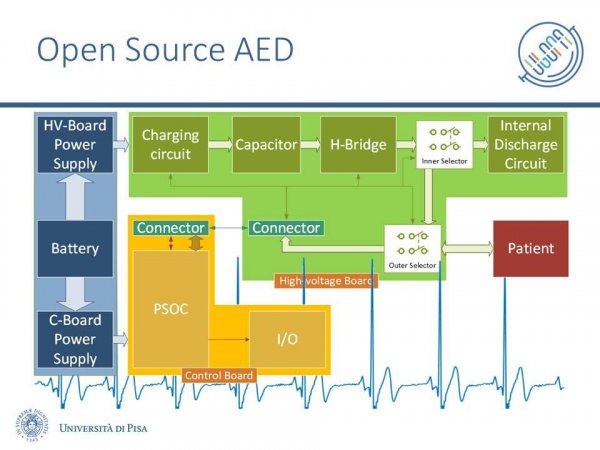
- OPEN SOURCE
- WELLNESS & HEALTHCARE
- FABRICATION
- KIDS & EDUCATION
- RECYCLING & UPCYCLING
- ROBOTICS
- ENERGY & SUSTAINABILITY
- 3D PRINTING
- HOME AUTOMATION
- INTERNET OF THINGS
- GAMES
- HACKS
- YOUNG MAKERS (< 18)
- FASHION & WEARABLES
- ART
- ARTISANS & NEW CRAFT
- CULTURAL HERITAGE
- MUSIC & SOUND
- STEAM PUNK
- 3D SCANNING
- NEW MANUFACTURING
- ARDUINO
- SCIENCE
- BIOLOGY
- FOOD & AGRICULTURE
- CROWDFUNDING
Risultati per TAG "Robotics"

Amnon Demri - Quickest-Owl
"cockroach " Laser shooter.
A laser display that "shoot" cockroach on a wall , using a web cam and computer vision.

ANDREA BELLI, DAVIDE BELLI, FILIPPO BELLI, CARLO COLETTA, EMANUELE COLETTA, EMANUELE ALFANO, VLADIMIRO ERCOLINO, ANTONELLI VITTORIO
UN VERO 3D PAC ROBOT MAN RADIO COMANDATO CON ALTRETTANTI FANTASMINI
SM Pietro Coppo Isola
Gli alunni dell'istituto tecnico Pietro Coppo di Isola presentano i lavori svolti durante l'anno scolastico e i progetti realizzati per l'esame di maturità professionale.

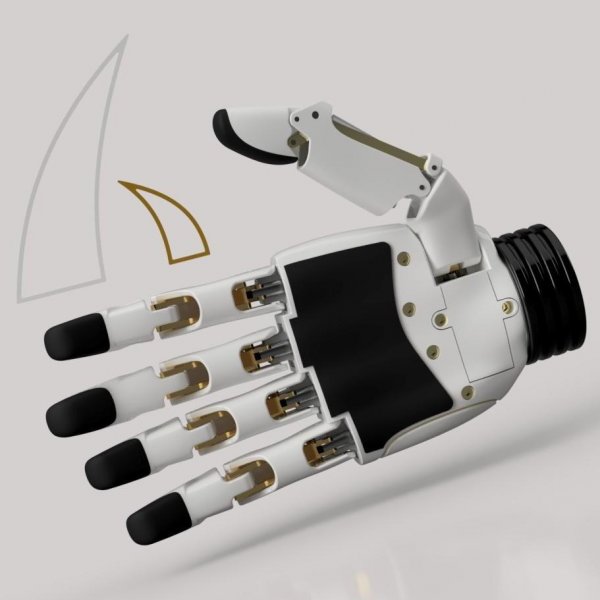
BionIT Labs
Adam’s Hand è una protesi mioelettrica della mano innovativa: leggera, robusta, a basso costo e semplice da utilizzare.

Robotic Thunder
ALBATROS, lo SmartPlane versatile.
Decollo e atterraggio di un quadricottero, durata in volo di un aereoplano.

Laura Giarré, Ilenia Tinnirello, Daniele Croce, Domenico Garlisi, Federica Pascucci, Federica Inderst, Giovanni galioto, Natale Galioto, Fabrizio Garlisi
Seguendo percorsi predefiniti situati in luoghi pubblici come aeroporti, centri commerciali, musei, ecc., le persone con disabilità visive possono muoversi in maniera autonoma in ambienti a loro sconosciuti. Arianna è un sistema di navigazione flessibile a basso costo che può essere utilizzato in qualsiasi ambiente sia indoor (aeroporti, musei, ospedali, centri commerciali) che outdoor (stazioni, marciapiedi, ecc.). Fornisce informazioni di localizzazione a qualsiasi persona (tra cui i non -vedenti perché si basa sull'utilizzo di un dispositivo elettronico pervasivo come lo smartphone. Il basso costo e la facilità d'uso sono aspetti fondamentali per rendere il sistema accessibile a tutti e garantisce una rapida diffusione. Grazie a Arianna, i non vedenti possono aumentare la loro indipendenza e l'inclusione sociale. Come la pavimentazione tattile, Arianna consente alle persone, anch enon vedenti, di muoversi da un posto all'altro in modo molto semplice, i vantaggi del sistema sono variati. I gestori dei luoghi possono installare facilmente le strisce, ridurre il costo dell'ambiente e fornire agli utenti un interattivo e facilmente configurabile, è possibile aggiungere molti altri servizi al sistema. Inoltre con l'impiego di i-beacon si possono fprnire anche informazioni specifiche in riferimento al punto di interesse.
Il presente progetto (ARIANNA 2.0) è un'estensione che integra i sensori inerziali a bordo raggiungendo l'obiettivo di aggiungere più precisione, informazioni addizionali e feedback vengono date all'utente quando il percorso sul pavimento viene perso. Vedi http://in.sight.srl
Michelangelo Pasinetti, Davide Stabelli, Daniele Gamba
Bionic Sync è una mano artificiale, stampata in 3D e modulare, che unisce la manifattura additiva a quella tradizionale.
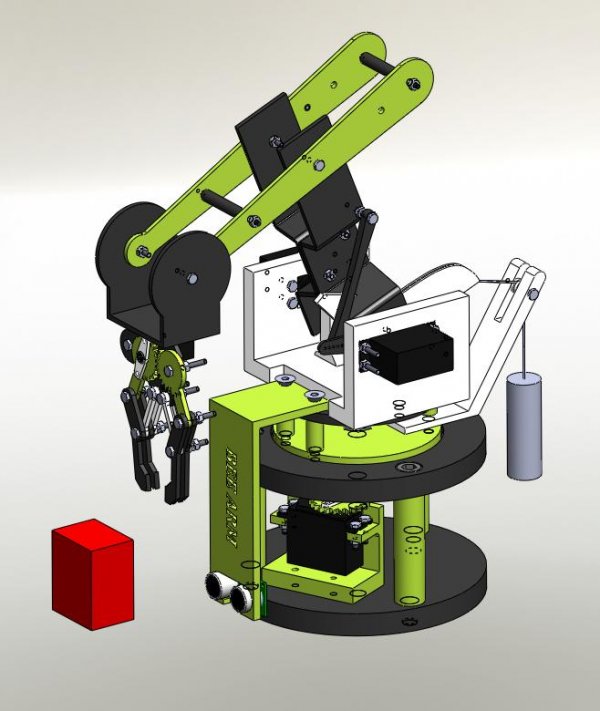
Istituto Tecnico Industriale Renato Elia di Castellammare di Stabia
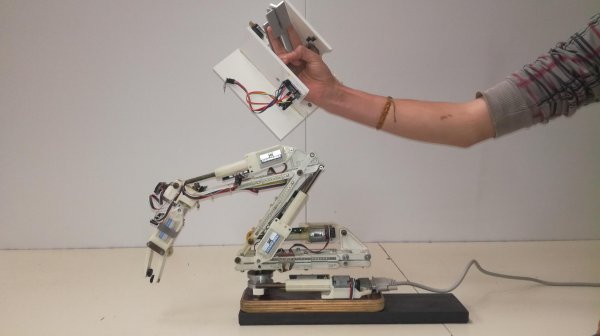
Il robot antropomorfo si presenta come prototipo funzionante di braccio robotico programmabile da utilizzare per ulteriori sviluppi ed esercitazioni in aula, finalizzato a riprodurre sommariamente i movimenti del braccio umano.

CampuStore
CampuStore's motto is Innovation for education, where education does not only stand for schools and universities, but also any other organization dealing with t …

Ludovico Gabrielli, Federica Piccardi, Stefano Di Pasquale
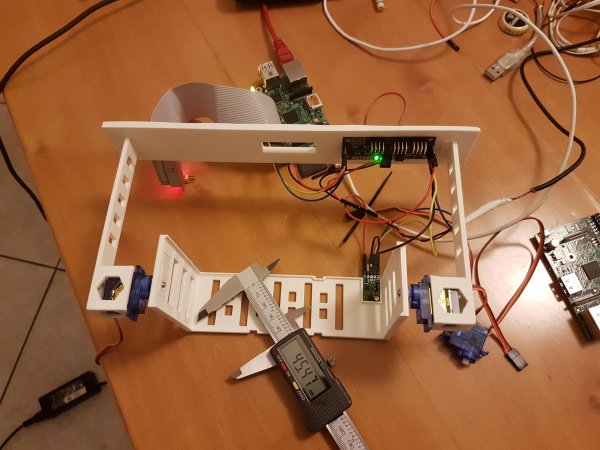
DeltaSat è una sonda capace di raggiungere ed esplorare la stratosfera e di trasmettere immagini e dati in real-time, per poi ritornare a terra integra per essere riutilizzata.


ENI
Eni è un'impresa dell'energia che impiega più di 33.000 persone in 73 paesi nel mondo. Eni lavora per costruire un futuro in cui tutti possano accedere alle r …
Giovanni di Dio BRUNO
ERWHI is an open source SLAM robot with advanced feature like human interaction.

Giancarlo Pellis
Esoscheletro realizzato da TC e personalizzato ritrovando degli assi articolari per il rispetto della cinematica deambulatoria.

Ex Robot team
Dispositivo composto da un rover e da un perlustratore in grado di scovare ordigni esplosivi al di sotto di qualsiasia automezzo comandato a distanza con filo per evitare eventuali inneschi involontari.

5ECn, ITIS P.Paleocapa / principali autori Sermisoni Samuele e Crotti Luca
É la riproduzione realistica e funzionante del rover Exomars. Si muove, acquisisce dati, preleva campioni e osserva il mondo.
#nocomment
Gimbal incredibilmente economico, preciso ed accurato come alternativa ai dispositivi commerciali

Thanos Tziatzioulis
Hand of Rob is a 3D Printed robotic hand that mimics the movement of the human hand with the wireless glove. The robotic hand is controlled through an Arduino and programmed in C++ language
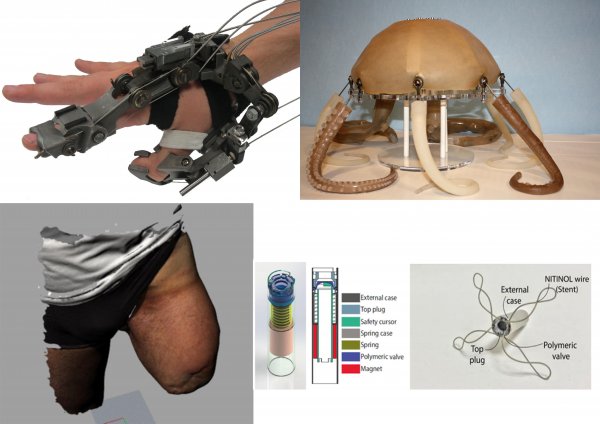
Nicola Vitiello, Cecilia Laschi, Arianna Menciassi
La Robotica Indossabile ha lo scopo di realizzare dispositivi meccatronici allo scopo di migliorare l'attività dell'utilizzatore umano nei campi della riabilitazione, dell'assistenza e del potenziamento delle capacità umane.
La Soft Robotics è un campo interdisciplinare che si occupa di robot costruiti con materiali morbidi e deformabili
Sviluppo di invasi protesici con design personalizzato, realizzazione di sfinteri artificiali extra- e endo-uretrali a controllo magnetico

Chiara e Luca Randazzo
Hubotics è un esoscheletro indossabile per arti superiori che mira a permettere un uso intensivo, direttamente in casa, da parte di persone con disabilità motorie. Il sistema è interamente realizzato mediante stampa 3D e componenti open-source, essendo versatile e estremamente adattabile alle esigenze di vari utenti.
Davide Aloisi e Alessio Di Brigida
L.E.O. è un robot in grado di migliorare e facilitare l'apprendimento nelle scuole e non solo, divertendosi.

Maksim Masalski
Maker Kit E1it is an educational electronic kit for those who are interested in learning about simple electronics creation.
Istituto M. Massimo, MakingOpen.net team coordinated by Claudio Becchetti with Fabio Topani head of R&D
Robot Professionali open source costruiti a partire dai 10 anni: non geni ma 60 studenti che hanno voglia di divertirsi

Antonio Bicchi, Gaspare Santaera, Giacomo Dinuzzi, Manuel Barbarossa
mano robotics, semplice, robusta, efficace, manipolazione soft, natural motion, robotica umanoide, prostetica, interazione uomo-robot.
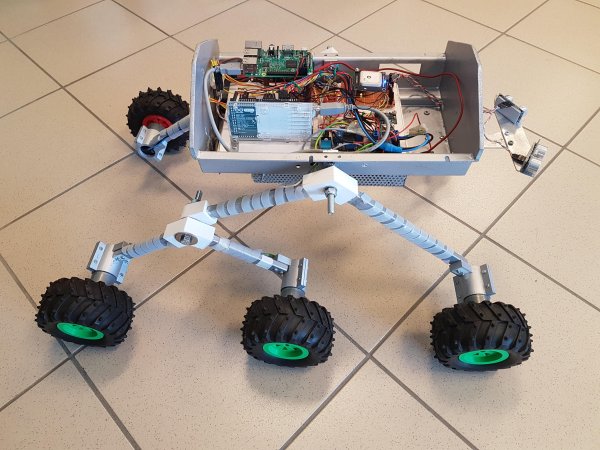
ITT "Guglielmo Marconi" di Staranzano (GO), gruppo "Progetto robotica"
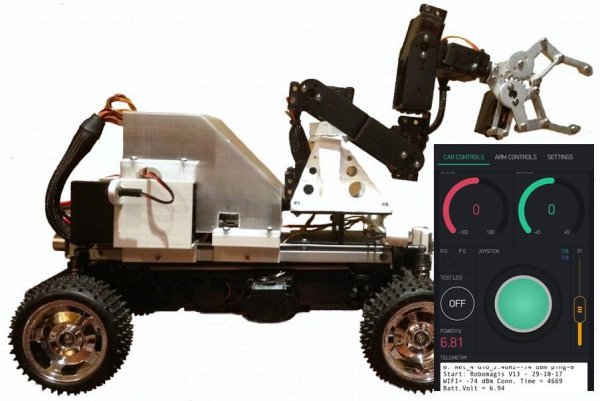
Drone terrestre, dotato di 6 ruote, telecamera, movimento autonomo e controllo tramite smartphone, ispirato ai rover inviati dalla NASA su Marte.

Giuseppe Ferrò, Luca Boncagni, Daniele Carnevale, André Neto, Filippo Sartori
Un framework di controllo usato per il controllo di reattori a fusione sbarca nella robotica: hardware e software dedicati per il controllo real-time di un manipolatore con sistema di visione

Lorenzo Daidone
Mi piaci se ti muovi - framework per lo sviluppo di applicazioni interattive. Campi di applicazione: robotica, gaming, e healthcare.
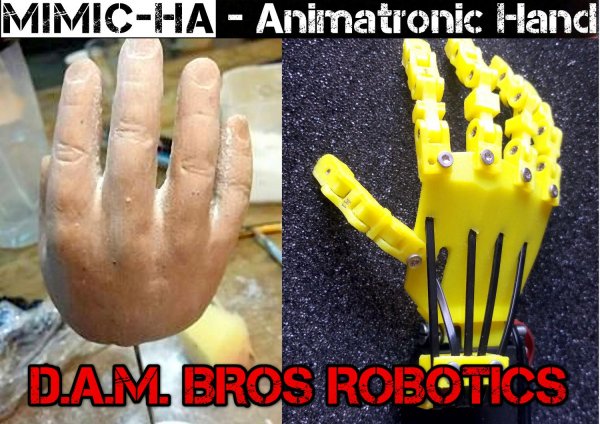
DAM Bros Robotics
Mano animatronica con sensori di forza e pelle realistica. Ideale per il settore cinematografico o come protesi a basso costo.

Federico Gualdi, Roberto Lucchisani, Nicholas Silvestri
Optical Wheelchair nasce per aiutare persone affette da forme di disabilità gravi. Attraverso un particolare Hardware sarà possibile muovere una sedia a rotelle solo con il volto.

Mattia Strocchi
Orion si propone come un nuovo sistema per espandere i limiti del corpo umano, controllabile semplicemente con i nostri gesti.

Giuseppe Airò Farulla, Andrea Bulgarelli, Marco Indaco, Ludovico O. Russo
Un Sistema di Comunicazione Remota per Utenti Sordociechi.

Mirco Piccin
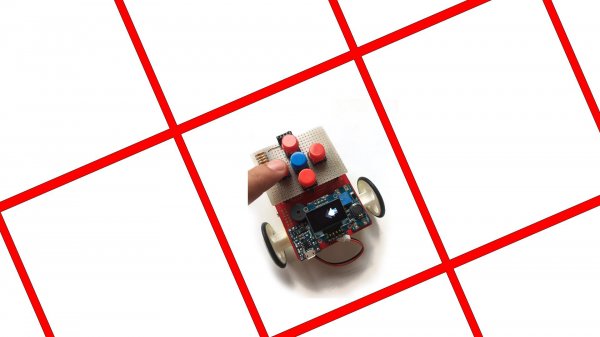
playROS è un progetto che mira a spiegare al pubblico il funzionamento di ROS (Robot Operating System) attraverso un gioco semplice e conosciuto da tutti: il Tris.
Silvia Rossi
Robotica Sociale per l'Assistenza, Alzheimer, Tecnologie Assistive

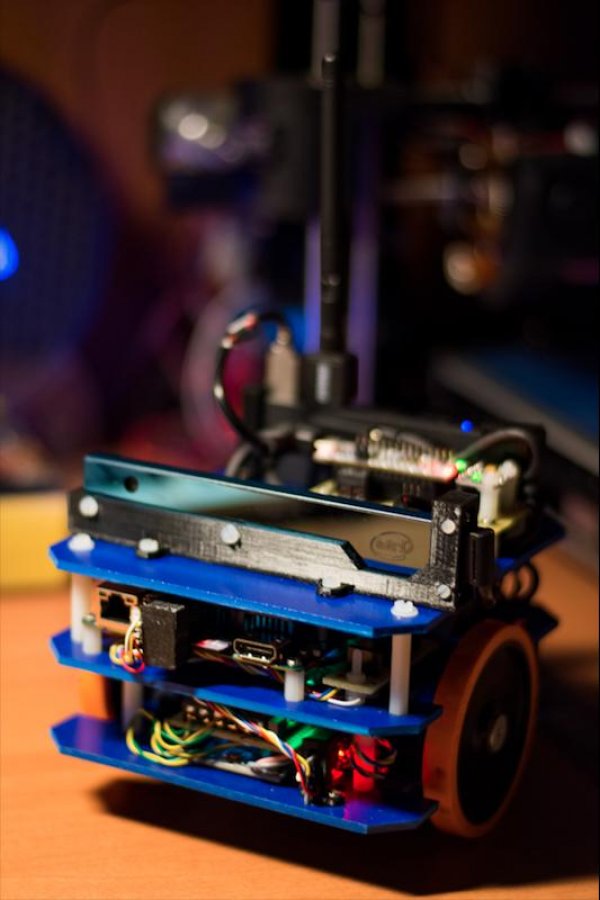
Niklas Sallali
Rhex è un robot esapode open source capace di camminare, fare movimenti complessi e individuare oggetti di un certo colore.

Dmitry Vasilenko, Maksim Masalski, MRobot Team mrobot.by
RoboCards -an electronic DIY-postcards for present and for creation. RoboCards it is eye-catching and imaginative electronic postcards kits that can be assembled without glue or soldering.

Silver Kuusik, Ivana Atanasova
RoboKoding enables children to learn electronics, robotics and programming in a fun, interactive and collaborative way.

Istituto Tecnico per il settore Tecnologico "G. Marconi" classi 4° e 5° elettrotecnica-elettronica
Band musicale composta da quattro androidi: batteria, tastiera, chitarra e basso accompagnati da un androide ballerina.

Giuseppe Palestra
Robot4Children ha sviluppato una soluzione integrata robot-software abbinata ad una metodica innovativa di applicazione assistiva rivolta ai bambini affetti da disturbi dello spettro autistico.
•Lucia Pallottino • Manolo Garabini •Danilo Caporale • Stefano Giordano •Vincenzo Ferrari •Carmelo De Maria •Di Pietro Licia.• Giuseppe Caruso •Ilias Seitanidis •Clara Amato •Giuseppe Portaluri
Sicurezza, protezione, precisione e performance in ambiti industriali, clinici e sul cloud.

SANBOT.IT
La nuova piattaforma Sanbot è il risultato di anni di ricerca e sviluppo e permette di portare le potenzialità del Cloud e dell’Intelligenza Artificiale nei …

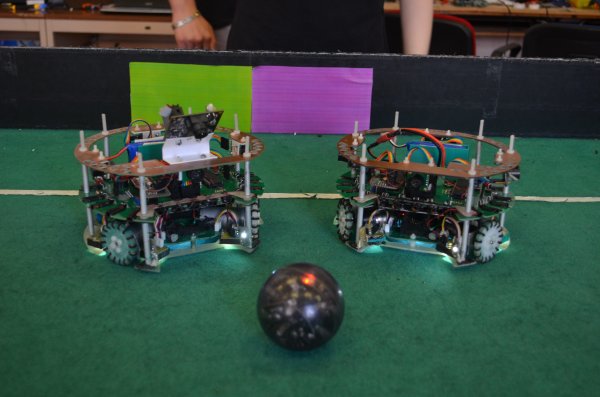
Liceo Scientifico Bruno Touschek (Grottaferrata RM)
Come studenti di un liceo scientifico presentiamo un prototipo completamente autonomo con la funzione di completare un a partita.

SOCIETA' REGIONALE PER LA SANITA' - SO.RE.SA. S.P.A.
SO.RE.SA. S.p.A. con unico Socio
Sede Legale: Centro Direzionale Isola F9 - 80143 Napoli
Tel. 081-2128174 - www.soresa.it
Soresa SpA – Società Region …

Sviluppo Campania SpA
Sviluppo Campania è una società in-house della Regione Campania. Il suo obiettivo è concorrere, sulla base delle direttive della Regione, all'attuazione di p …
Antonio Ianiero
Thaumachines - Tecnologie per lo stupore.
Un'esposizione di macchine che fanno cose sorprendenti per chi le guarda.

Università Telematica Internazionale UNINETTUNO
L'Università del futuro: UNINETTUNO, l'unica Università telematica in Italia valutata a pieni voti da ANVUR e MIUR, continua ad evolvere il suo modello pedago …

Umberto Scarcia, Gianluca Palli, Lorenzo Moriello, Claudio Melchiorri. LAR (LABORATORIO DI AUTOMAZIONE E ROBOTICA, UNIBO)
Il gruppo di ricerca del laboratorio di Automazione e Robotica dell'Università di Bologna desidera condividere con il pubblico del Maker Faire 2017 i risultati delle ultime ricerche nel campo della prototipazione di mani robotiche antropomorfe e di algoritmi per la telemanipolazione di quest'ultime. Porteremo alcuni dei nostri più recenti prodotti e un set up che permette al pubblico di controllare in maniera estremamente intuitiva la mano e cimentarsi con l'afferraggio di oggetti comuni.
Classi terza quarta quinta manutentori elettrici elettronici dell'Ipsia G. Ceconi Gruppo "latuaideadimpresa" simulazione startup.
L' Universal Remote Controller è un guanto con sensori che permette di controllare in modalità wireless dispositivi fino a 5 assi.
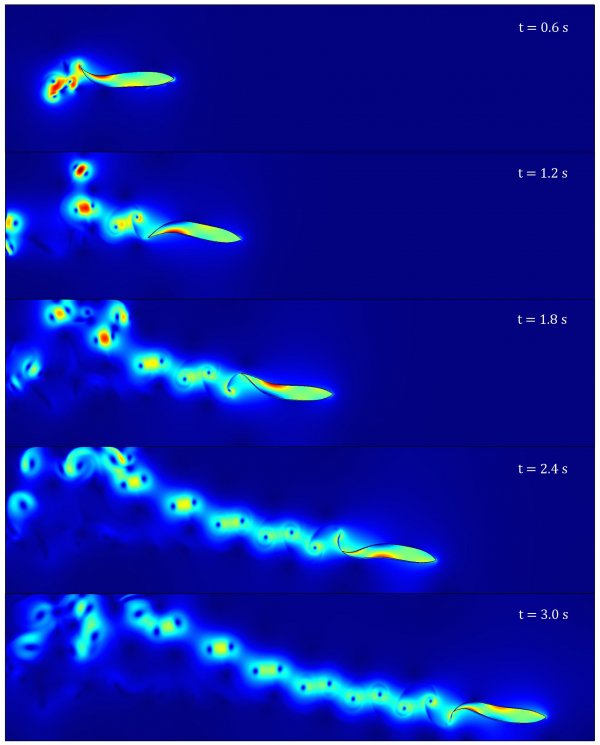
Michele Curatolo, Luciano Teresi
We use Finite Element Methods to solve the problem of fluid structure interaction for a swimming fish







































