
Espositori 2019
- 3D PRINTING
- ART
- EDUCATION
- HOME AUTOMATION
- INTERNET OF THINGS
- KIDS & EDUCATION
- RECYCLING & UPCYCLING
- ROBOTICS
- SCIENCE
- YOUNG MAKERS (< 18)
- BIOLOGY
- GAMES
- ARTIFICIAL INTELLIGENCE
- OPEN SOURCE
- NEW MANUFACTURING
- FABRICATION
- WELLNESS & HEALTHCARE
- ENERGY & SUSTAINABILITY
- FOOD & AGRICULTURE
- 3D SCANNING
- CULTURAL HERITAGE
- AEROSPACE
- HACKS
- MUSIC & SOUND
- ARTISANS & NEW CRAFT
- FASHION & WEARABLES
- DRONES
- STEAM PUNK
- ARDUINO
- CROWDFUNDING
Risultati per TAG "Robotics"

V. Sperati, B. Özcan, L. Romano, S. Scaffaro, T. Moretta, N.Faedda, V. Guidetti, G.Baldassarre
+me è un gioco sperimentale interattivo, pensato come strumento di supporto nella terapia dei
Disturbi del Neurosviluppo.

Pietro Amodeo (ICB-CNR), Francesco Castelluccio (ICB-CNR), Salvatore Donadio (ICB-CNR), Alessandra Rocco (INO-CNR), Simona Mosca (INO-CNR), Maria Parisi (INO-CNR), Valentina Di Sarno (INO-CNR), Gianluca Notariale (INO-CNR) - a cura di: MoSeF – ICB-CNR,
RoFlEx, un exhibit robotico per dimostrare spettroscopia e fluorescenza, rappresenta uno strumento attraente ed efficace per la comunicazione scientifica.

Robotics for Rehabilitation team
PLANarm2 è un robot parallelo di tipo end-effector per neuroriabilitazione. Consente al paziente di esercitare movimenti planari della sua mano, tramite movimenti combinati del gomito e della spalla. La manopola impugnata dal paziente è controllata da due motori. Il dispositivo è dotato di due celle di carico per misurare la forza scambiata con il paziente. Gli algoritmi di controllo adattativo e basato sulla forza consentono di aiutare il paziente nell'esecuzione di attività di riabilitazione in base alle proprie capacità ed al proprio livello di disabilità. Un ambiente grafico propone attività interattive e coinvolgenti. Il dispositivo è progettato per essere vincolato ad un tavolo, anche in ambiente domestico. La modularità del sistema di controllo basato su ROS consentirà una semplice integrazione di dispositivi aggiuntivi.

IAS-Lab (Intelligent Autonomous Systems Laboratory), University of Padova
Il progetto SPIRIT è un progetto di ricerca sostenuto dall’Unione Europea, che mira a sviluppare un framework generico per l’ispezione autonoma tramite robot, così da passare dalla programmazione dei task di ispezione complessi alla semplice configurazione di tali task. Questo progetto include attività di ispezione tramite sensori di acquisizione di immagini durante un movimento continuo, per eseguire la scansione completa della superficie di un oggetto e ridurre sostanzialmente i costi di progettazione durante l'installazione di robot di ispezione in ambienti industriali.

Andrea Chesi IIS Tito Sarrocchi Siena
L’obiettivo del progetto “leap – drone” è di pilotare un sistema complesso, come un drone, utilizzando il movimento delle mani, invece di un normale radio comando. Il sensore usato per raggiungere questo obiettivo è una telecamera “leap motion”.

Clementoni R&D
We would like to collect needs and ideas meeting children, makers and AI experts to discuss about AI smart toys

The Air Busters - IV B ITET “Rapisardi Da Vinci” - Caltanissetta
Fornisce informazioni in tempo reale sui gas inquinanti presenti in tutto il territorio mediante rilevazioni da stazioni mobili di analisi.

Alan Advantage
La Alan Advantage srl, con sedi a Roma e Boston, attiva da più di dieci anni nel campo dell’Innovazione, si occupa di attività di Consulenza strategica.
…
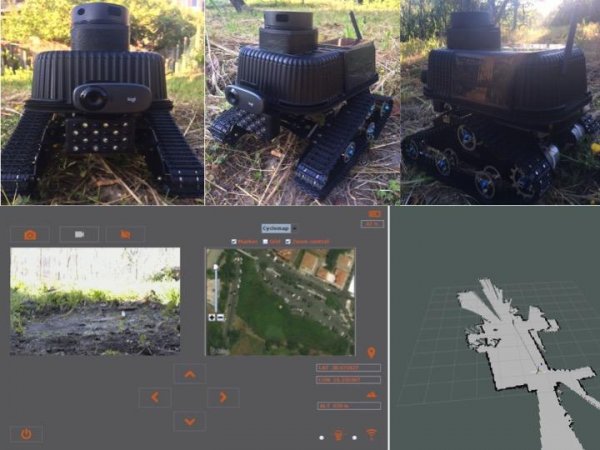
Giuseppe Massaria, Antonio Idà
ALAN-2 è un Robot cingolato per usi militari.Ha il GPS,supporta l’apprendimento automatico,la navigazione autonoma e la funzione NAV con la quale è possibile dare una missione.Il sistema ROS unito ad una Rete Neurale forniscono l’accesso all’A.I.E' corredato di una Stazione di Ricarica Smart(custom).

MAURIZIO ESPOSITO, FABRIZIO MARIGNETTI, ERIKA OTTAVIANO, ALESSANDRA SANNELLA, GIUSEPPE TOMASSO
Il nostro progetto è basato sull'idea che sostenibilità ambientale e sociale sono due facce della stessa moneta e che vi sono forti connessioni tra innovazione tecnologica e ingegneria sociale.

Colegiu Tehnic Gheorghe Cartianu, grades 9-12
Obiettivo principale: lo sviluppo dell'educazione tecnologica per avere studenti ben preparati che possano essere capaci di padroneggiare ed esplorare le nuove tecnologie.

Arrow Electronics Italia s.r.l.
Arrow is a global provider of products, services, and solutions to industrial and commercial users of electronic components and enterprise computing solutions.
…

Unione Astrofili Italiani
In questo progetto vengono presentate le linee guida per la progettazione e la costruzione di un piccolo osservatorio astronomico personale

Giovanni Bernardini, Massimo Gennaretti, Jacopo Serafini, Valerio Vezzari
Banco prova robotizzato dotato di sistema di monitoraggio strutturale con sensori in fibra ottica FBG per la caratterizzazione dinamico-strutturale di componenti aeronautici

IIS GAE AULENTI - Biella (Gruppo ENT)
Robot albero, in grado di proteggere le piante e parlare con le stesse.

Black Brain Robotics Inventor.
The black brain creative robotics mechanism project.

Michelangelo Bornò, Franco Ferrini
Braccio robotico, con sei (6) gradi di libertà ed articolazioni senza gioco.

CampuStore
Anche quest'anno CampuStore porta nuove visioni e concept a Maker Faire Rome: a ridosso dell’area Kids organizzata da Codemotion Kids!, CampuStore è presente …

Carlo Alberto Pinto
Captiks realizza sistemi innovativi per l’analisi del movimento tramite sensori indossabili per lo Sport, la Riabilitazione e la Ricerca
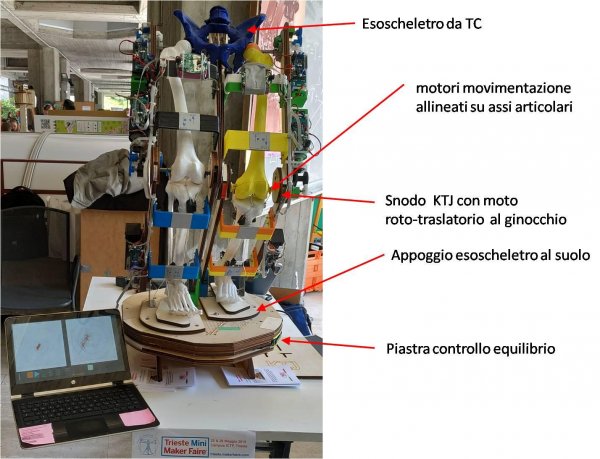
Giancarlo Pellis
Il progetto mira ad avere uno strumento di controllo per mantenere in equilibrio un esoscheletro durante la flesso-estensione degli arti inferiori.

DIAG Robotics Laboratory - Sapienza Università di Roma
Attività di ricerca del Laboratorio di Robotica del DIAG, Sapienza Università di Roma.
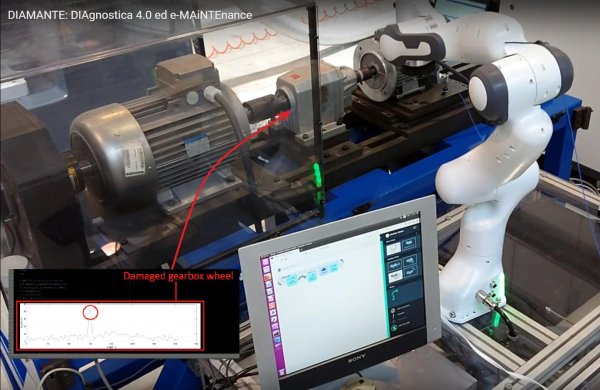
Marcello Bonfè, Emiliano Mucchi, Federico Contro, Alessio Sozzi
La robotica collaborativa per il controllo qualità della produzione, monitoraggio e diagnostica del prodotto, tramite tecniche sofisticate per l'analisi di vibrazioni e rumore.
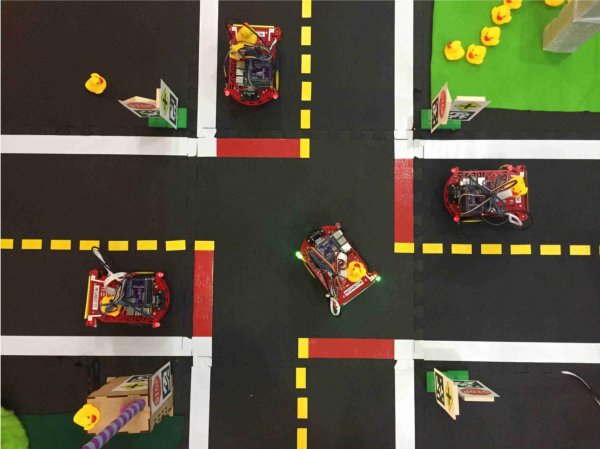
Duckietown Foundation
La piattaforma allo stato dell’arte per l’educazione e la ricerca in robotica ed apprendimento automatico, progettata per abilitare i maker delle future generazioni di automazione.

4°-5° Esc, Liceo Monti Chieri (TO)
"Eagle & Beagle" è composto da due robot che interagiscono tra loro: un drone (Eagle) e un rover (Beagle).

EMC Elettronica Srl
Elettronica Open Source è un blog nato nel 2006 con l'intento di diffondere articoli di qualità e di consentire lo scambio di idee ed esperienze tra professio …

Martin Romeo
innovazione, 3dprint, interattività, interaction design, visual art, profumo, arduino, raspberry, olli essenziali, fragranza, tecnologia, ibrido, premiere, smartphone, immagine, colore, percentuale, multimedia, led, arte

Daniele Carnevale, Luca Calacci, Andrea Monti
Exoway: un primo prototipo di esoscheletro su ruote

Team: Idealizer: Weslley Lioba Caldas Coordinator: José Gleisson da Costa Germano Advisor: Sandro Costa Mesquita Researcher: Tiago Diógenes de Araújo
Il progetto consiste in occhiali per ipovedenti con l'obiettivo di aiutare gli spostamenti dell'utente, garantendo una migliore indipendenza.

Samuele D'Angelo, Francesco Brocca, Vittorio Ludovico Viero
Gemini è una scheda controllo motori DC per applicazioni che richiedono un controllo a velocità costante

Emanuele Della Volpe
Sviluppo di soluzioni tecnologiche innovative multifunzionali attraverso l’utilizzo di robot ed automi aerei, terrestri e marini interconnessi.

Manuel Dadda, Stefano Picco, Andrea Zoli
Drone utilizzato in caso di terremoto, scatta foto ad edifici, mostra probabilità di trovare persone sepolte grazie ad intelligenza artificiale.

HTWK RoboCup team
Il team di RoboCup HTWK partecipa alla RoboCup SPL con robot NAO completamente auotonomi. Nel 2018 HTWK ha vinto la RoboCup.

Domenico Prattichizzo
Dispositivi robotici e aptici indossabili, applicazioni nel campo della riabilitazione, assistenza a pazienti, realta` virtuale e aumentata, teleoperazione di robot.

Ingenuity Labs Research Institute
Cosa hanno in comune i pendoli e il camminare? Scopri la scienza alla base del movimento umano con il tuo nuovo compagno robot.
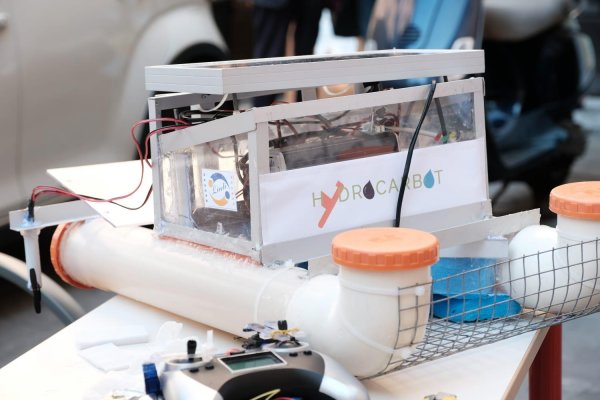
Giorgio Bernardini, Alberto Conte, Luca De Ponti, Tommaso Pa
Hydrocarbot permette di depurare l'acqua dalle sostanze oleose(olio, gasolio, benzina...) rendendoli riutilizzabili.
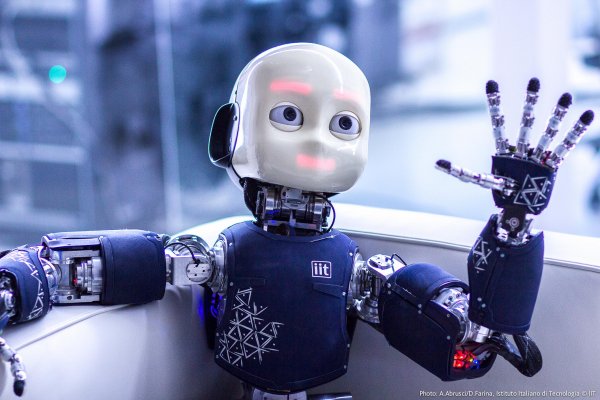
ISTITUTO ITALIANO DI TECNOLOGIA
Tecnologie robotiche e di intelligenza artificiale sviluppate dall'Istituto Italiano di Tecnologia nell'ambito della sua attività di ricerca.

Il Brevetto - Giornale delle Invenzioni
La “Genialità” è il tema principale del magazine “Il Brevetto”, la curiosità e la passione per l’innovazione sono i valori di una redazione che nas …
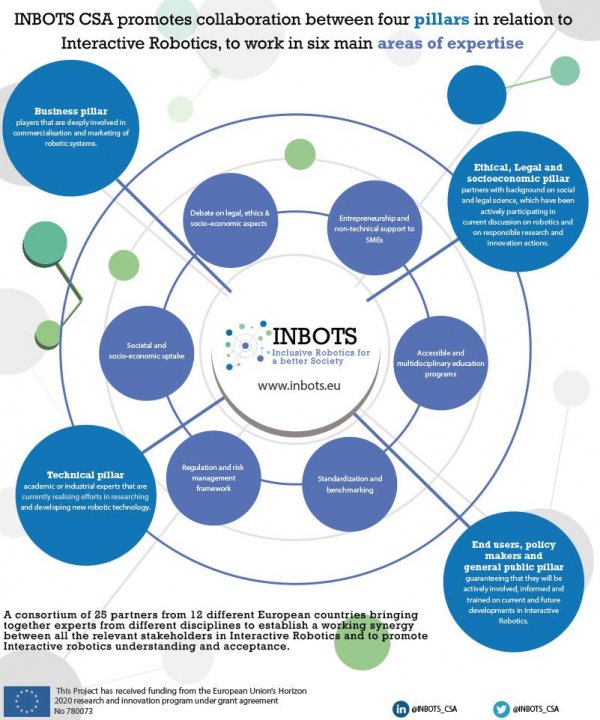
SIRSLab Group
INBOTS project brings together experts from different disciplines and European countries involved in the understanding and acceptance of Interactive Robotics.

Matteo Bianchi, Manolo Garabini, Lucia Pallottino, Vincenzo Ferrari, Carmelo De Maria, Alessandro Tognetti
Soluzioni per applicazioni mediche e assistive, robotica autonoma, mobile e industriale e per l’interazione avanzata uomo-macchina

Robotics@PoliTO
Dimostreremo e presenteremo le attività del Politecnico di Torino nel campo della robotica industriale e di servizio. Droni, realtà virtuale, dispositivi indossabili, robot industriali, robot di servizio per l'agricoltura e altre applicazioni saranno i protagonisti del nostro spazio alla Maker Faire.
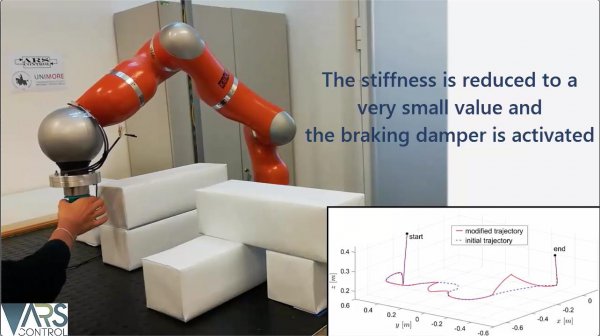
ARSControl Team
Nel POP sarà illustrata la ricerca sulla robotica svolta presso il laboratorio ARSCONTROL.

Dipartimento di Informatica, Università di Verona
Innovazione didattica e ricerca nel nuovo laboratorio ICE dell'Università di Verona
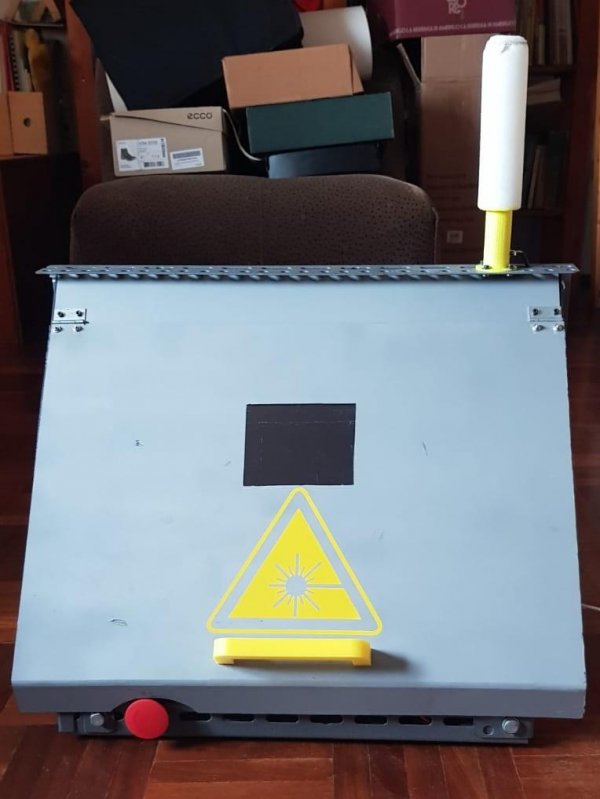
Mariglen Ymeraj, Filippo Guerra, Davide Cassanelli, Giovanni Gibertoni, Giuseppe Antonello Gentile
Laser Engraver è una piccola macchina CNC per l'incisione laser di immagini su materiali come legno, plastica, pelle e molti altri.

Michele Tavolacci
una semplice videochiamata con whatsapp,skype,messenger o con qualsiasi altra piattaforma che supporti le videochiamate
per azionare motori remoti.

Libertà di vivere - ITS Meccatronico - Treviso
Dispositivo che aumenta la mobilità delle persone colpite da handicap respiratorio trattate in via continuativa con l’ossigenoterapia domiciliare

Istituto Massimiliano Massimo di Roma, gruppo Making Open: Claudio Becchetti, Fabrizio Olati, Paolo De Gregorio, Fausto Poletto, ...
Guarda, prova e costruisci le tecnologie dello spazio (razzi, robots, … ) progettati dagli studenti dell’Istituto Massimo di Roma

Istituto Massimiliano Massimo di Roma, gruppo Making Open: Claudio Becchetti, Fabrizio Olati, Paolo De Gregorio, Fausto Poletto, ...
Guarda, prova e costruisci le tecnologie dello spazio (razzi, robots, … ) progettati dagli studenti dell’Istituto Massimo di Roma

Marta Baratto, Silvestro Roatta e Marco Testa
Dispositivo per valutazione e allenamento della capacità di erogazione e controllo della forza nelle azioni di pinch e bite

Francesco Re
"Manutenzione 4.0 per dott Robot" è un sistema di manutenzione evoluto a servizio di un robot chirurgico innovativo sviluppato dalla start up Valuebiotech .
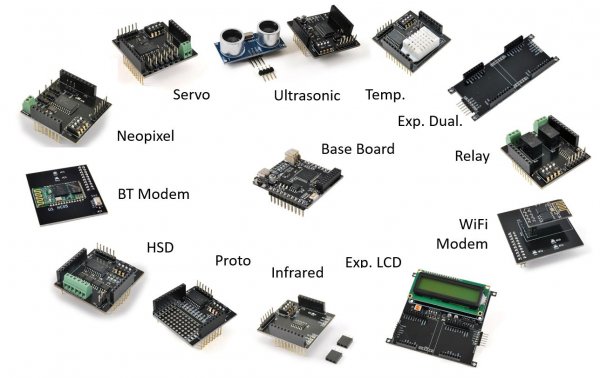
Francesco Ficili, Anna Falco, Antonio Volpe
Il Sistema Mercury è un systema di sviluppo HW/SW modulare pensato per semplificare design ed implementazione di sistemi Connessi ed IoT.





































