
Exhibitors 2021
- FASHION & WEARABLES
- INTERNET OF THINGS
- PRODUCT DESIGN
- 3D PRINTING
- 3D SCANNING
- ART
- ARTIFICIAL INTELLIGENCE
- BIOLOGY
- EDUCATION
- HACKS
- KIDS & EDUCATION
- OPEN SOURCE
- ROBOTICS
- MUSIC & SOUND
- ARTISANS & NEW CRAFT
- RECYCLING & UPCYCLING
- STEAM PUNK
- GAMES
- SCIENCE
- YOUNG MAKERS (< 18)
- FOOD & AGRICULTURE
- CIRCULAR ECONOMY
- AEROSPACE
- HOME AUTOMATION
- NEW MANUFACTURING
- STARTUP
- WELLNESS & HEALTHCARE
- ENERGY & SUSTAINABILITY
- FABRICATION
- INDUSTRIAL AUTOMATION
- RETROCOMPUTING
- DRONES
- CULTURAL HERITAGE
- VIRTUAL REALITY
Category "Robotics"
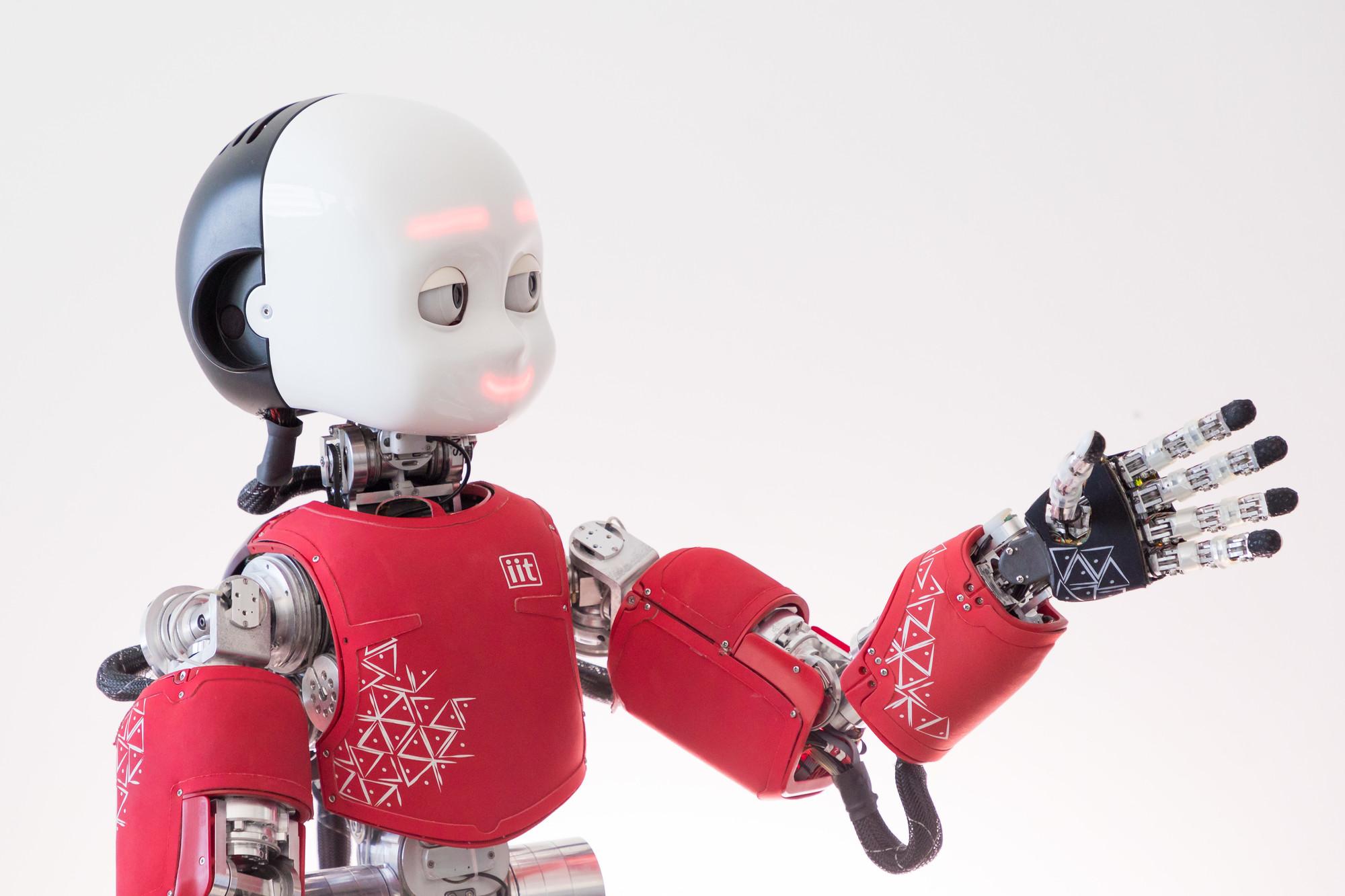
Robot next gen: anthropomorphic arms and quadrupeds for manipulating and exploring the real world.
Can you beat a robot in a card game? Learn about human-robot interaction research and test yourself!
Passive exoskeleton for back-support in industrial operations.

The IIT - SoftRobotics for Human Cooperation and Rehabilitation is located in Genoa at IIT Central Research Labs, but also has research facilities in Pisa (in collaboration with the Reserarch Center "E. Piaggio" of the University of Pisa), and in KmRosso area in Bergamo (in collaboration with the Intellimech Mechatronic Consortium). We also closely collaborate with researchers in IIT, in Pisa, at the German Aerospace Agency, the Arizona State University, the Universities of Rome and Siena, among many others.
PRISMA Hand II is a mechanically robust anthropomorphic robot hand. It is highly underactuated, as the 19 joints are driven by 3 motors via elastic tendons. Nevertheless, the hand can perform not only adaptive grasps but also in-hand manipulation.
HARMONY develops robotic mobile manipulation technologies for assisting staff in hospital environments.
KUKA Med is an anthropomorphic robotic arm used to assist physicians in different applications like rehabilitation and dental implants.
da Vinci Research Kit is a robotic system for minimally invasive surgery.
OPT4SMART goals: i) provide a theoretical framework to solve distributed optimization problems; ii) develop numerical optimization tools for cyber-physical networks
The PON-PlaCE project aims to test new technologies for the monitoring and eco-sustainable reuse of disused offshore platforms
Come and discover the robotic solutions for the manipulation of deformable objects such as cables and hoses developed in REMODEL
�SLIM� is the Snake-Like robot for Inspection and Maintenance that explore the most dangerous and inaccessible areas of industrial plants

A new generation of collaborative robots aiming at supporting workers during their activities both in manufacturing and hostile environments.
We will show prototypes of robotic grippers made by combining soft materials with magnetic actuators and devices capable of recreating tactile sensations in VR / AR environments.
In this project, we will demonstrate state-of-the-art methodologies that Politecnico di Torino is currently exploring to develop the body of theoretical knowledge and algorithms necessary for robots � and intelligent systems in general � to learn autonomously about objects in an open-ended manner.





































