
Exhibitors 2021
- FASHION & WEARABLES
- INTERNET OF THINGS
- PRODUCT DESIGN
- 3D PRINTING
- 3D SCANNING
- ART
- ARTIFICIAL INTELLIGENCE
- BIOLOGY
- EDUCATION
- HACKS
- KIDS & EDUCATION
- OPEN SOURCE
- ROBOTICS
- MUSIC & SOUND
- ARTISANS & NEW CRAFT
- RECYCLING & UPCYCLING
- STEAM PUNK
- GAMES
- SCIENCE
- YOUNG MAKERS (< 18)
- FOOD & AGRICULTURE
- CIRCULAR ECONOMY
- AEROSPACE
- HOME AUTOMATION
- NEW MANUFACTURING
- STARTUP
- WELLNESS & HEALTHCARE
- ENERGY & SUSTAINABILITY
- FABRICATION
- INDUSTRIAL AUTOMATION
- RETROCOMPUTING
- DRONES
- CULTURAL HERITAGE
- VIRTUAL REALITY
Result for TAG "Robotics"
An autonomous painter robot that creates watercolor paintings made at home with easily available or 3D printed material
A.R.A.C.H.N.E. is able to probe the soil, mapping and weeding the weeds to reuse them for soil mulching.
ADIUTOR is a robotic device for upper limb rehabilitation, designed for assisted rehabilitation directly at home.
Robot next gen: anthropomorphic arms and quadrupeds for manipulating and exploring the real world.
airport automatic pilot device to carry luggage and passengers from entrance to the check-in desk.
Three automatic musicians - bassist, drummer, glockenspiel players - will play with other automatic musical instruments and one "human" musician.
The Android called 'Brother', with autonomous decision-making abilities and interaction with the outside world based on event recognition through the use of Artificial Intelligence techniques. Brother is able to recognize the Italian sign language LIS by translating it into audio and Braille.
Applications of collaborative robots based on artificial vision and machine learning for object manipulation, detection and grasping.
It is a scrap built, a handmade, it educates the audience and the Project will be attractive to the audience due to how it functions.
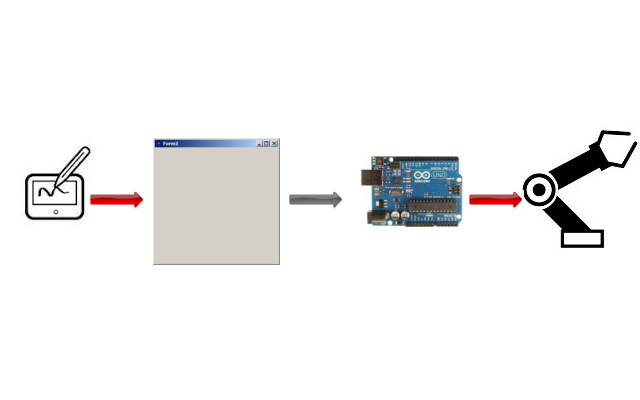
Braccione (Big arm) is a mechanical arm 2 meters long. It is made with some servos and with the extensive use of used materials. Braccione imitates your movements when you draw on its control graphics tablet.
CAMOSCA: Enabling normal electrical wheelchairs afford steps and even steep stairs, safely and completely self-driving, maintaining maneuverability in normal conditions.

Saperi & Co, will coordinate Sapienza projects at Maker Faire Rome.
Can you beat a robot in a card game? Learn about human-robot interaction research and test yourself!
Bringing together local data, Earth Observation and Machine Learning to better quantify the quality of the air we breathe.
CyberOrto is a system that allows you to manage a small vegetable garden in autonomy. You decide, through an application, which vegetables to plant and will provide for their cultivation, alerting you when they are ready for harvest.
Design of an autonomous rover according to Project Red: the working methodology, the software, the autonomous navigation and the prototype.
ENDRIU is an autonomous modular mobile robot for sanitization using UV-C light and electrostatic air filtering.
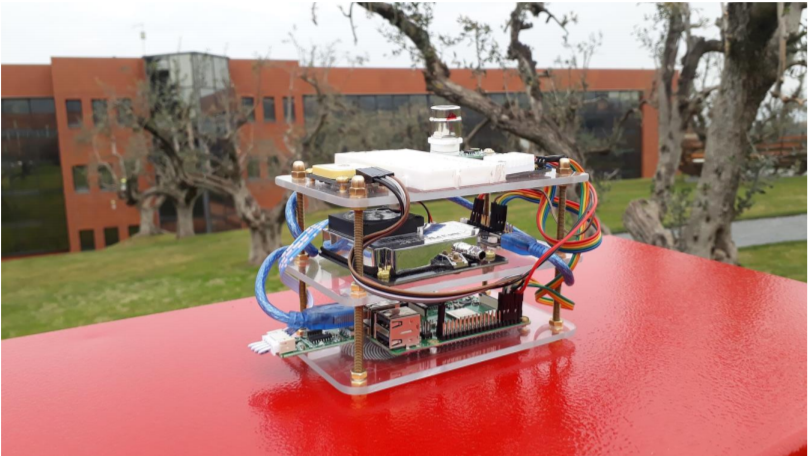
Erwhi Hedgehog is a small open source ROS robot that is capable of SLAM and Vision AI.
Passive exoskeleton for back-support in industrial operations.
It starts from the ground up, metaphorically but also materially. The project becomes the theatre for a transdisciplinary operation moving between the most radical agricultural practices and the most advanced technologies.
Hannah: a system for the automatic positioning and integrity control of the facial masks based on deep learning.

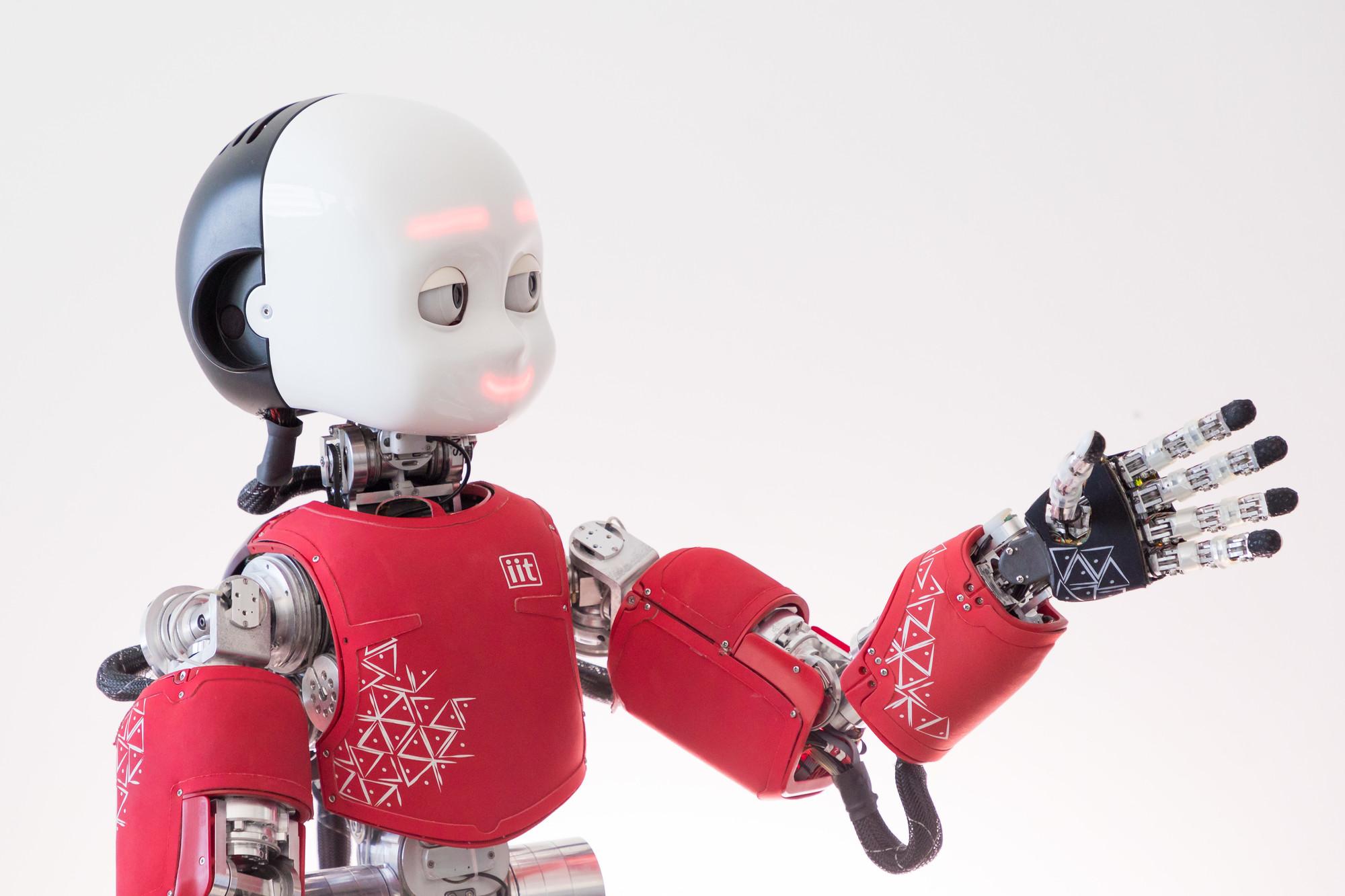
The IIT - SoftRobotics for Human Cooperation and Rehabilitation is located in Genoa at IIT Central Research Labs, but also has research facilities in Pisa (in collaboration with the Reserarch Center "E. Piaggio" of the University of Pisa), and in KmRosso area in Bergamo (in collaboration with the Intellimech Mechatronic Consortium). We also closely collaborate with researchers in IIT, in Pisa, at the German Aerospace Agency, the Arizona State University, the Universities of Rome and Siena, among many others.
Our research aims to improve human-robot collaboration using new technologies such as augmented reality and human motion tracking.
Easy-Task is a device that facilitates the creation of your drinks from simple juices up to cocktails
PRISMA Hand II is a mechanically robust anthropomorphic robot hand. It is highly underactuated, as the 19 joints are driven by 3 motors via elastic tendons. Nevertheless, the hand can perform not only adaptive grasps but also in-hand manipulation.
HARMONY develops robotic mobile manipulation technologies for assisting staff in hospital environments.
KUKA Med is an anthropomorphic robotic arm used to assist physicians in different applications like rehabilitation and dental implants.
da Vinci Research Kit is a robotic system for minimally invasive surgery.
The mini Jungle Band is a mini orchestra of four elements: The fox plays the Mandolin The turtle plays the Xilophane The squirrel plays the flute The cobra plays the Harmonica
The robot animals play with the musical score in MIDI format.
Musical robots and humans form a band and play original musical instruments. Instruments are a mixture of electronic and traditional musical instruments.

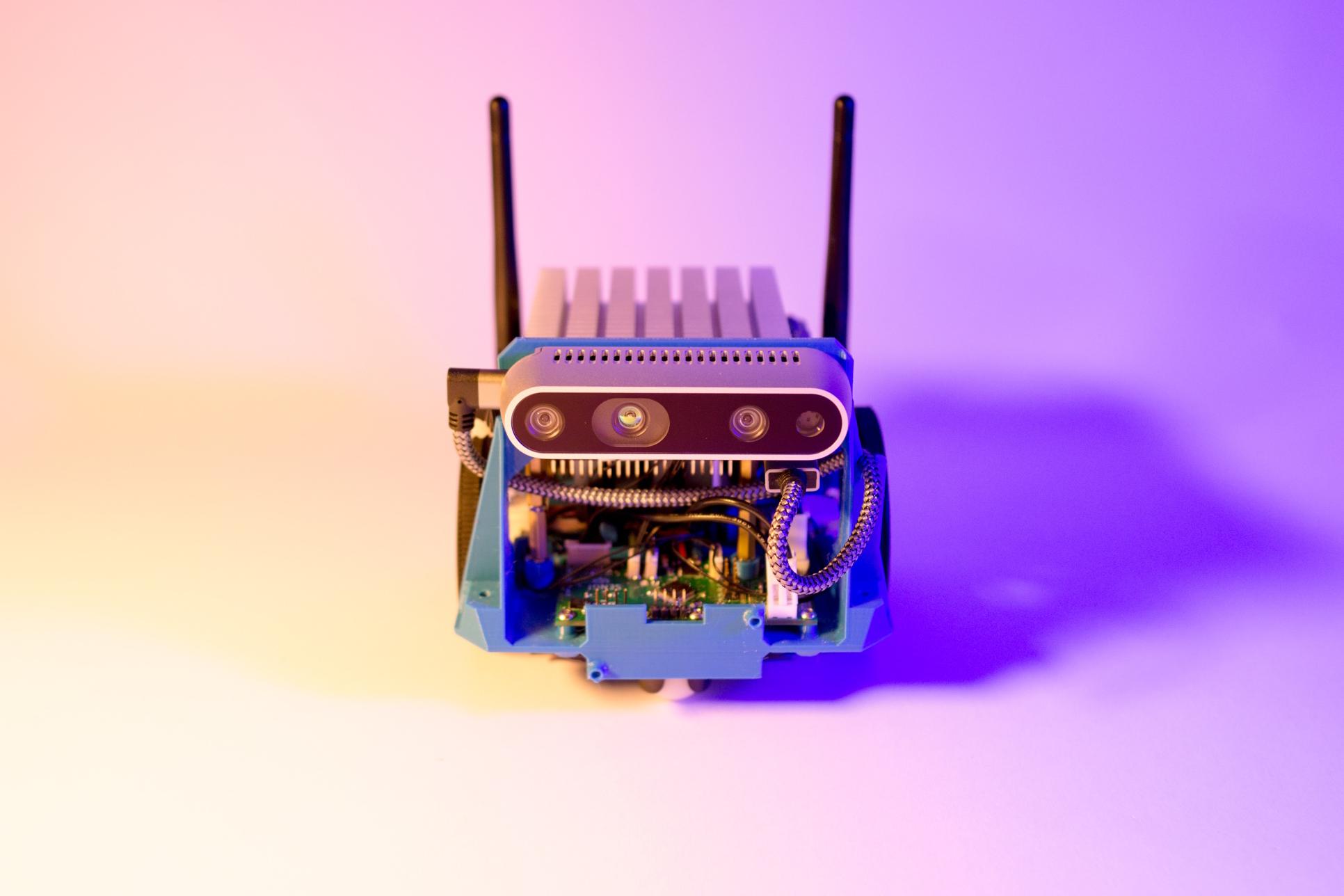
Nanosaur is a fully 3D printable robot made to work on your desk. Use a simple camera and use 2 OLED-like eyes. The size is only 10x12x6cm in only 500g and with a simple power-bank can wandering your desktop autonomously.
This sound installation arises from the need to reflect the emotional disconnection we experience today due to the health emergency.
Our project is based on the wireless transmission of signals using the principle of radio transmission whose initiator was Nikola Tesla.
OPT4SMART goals: i) provide a theoretical framework to solve distributed optimization problems; ii) develop numerical optimization tools for cyber-physical networks
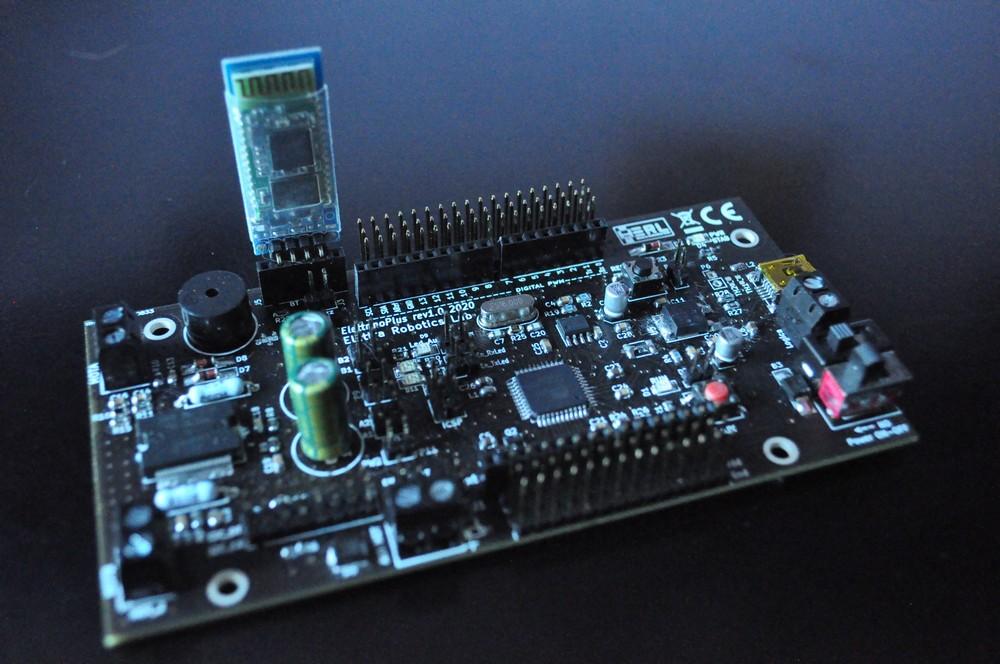
ElettrinoPlus is a prototyping board for DIY robotics with high performance, compatible with the Arduino environment.
An inkjet printer was transformed into a plotter by adding only an Arduino UNO board. With appropriate modifications it is possible to transform it into a vinyl, cardboard, paper or leather cutter.

The PON-PlaCE project aims to test new technologies for the monitoring and eco-sustainable reuse of disused offshore platforms
PVCorobot is a self-built collaborative robot with recycled materials and at low cost, controlled by a Siemens S71200 PLC following the real-time information received from a neural network in Python language installed on a Jetson Nano GPU.
REaD-EV3 is a e-learning project for educational robotics based on Lego� Mindstorms� EV3 and Open Roberta Lab platform
Come and discover the robotic solutions for the manipulation of deformable objects such as cables and hoses developed in REMODEL
Teams of fully autonomous robots play soccer with teams of 5 robots each. The initiative promotes robotics and AI research.
robots for social work and for catering
Autonomous Mobile Robot made in the industrial standard and integrated Artificial Intelligence as an additional safety element
Lambda is a multifunctional robot designed to move around the home.
This project concerns a robot capable of interpreting and performing signs in the Italian Sign Language.
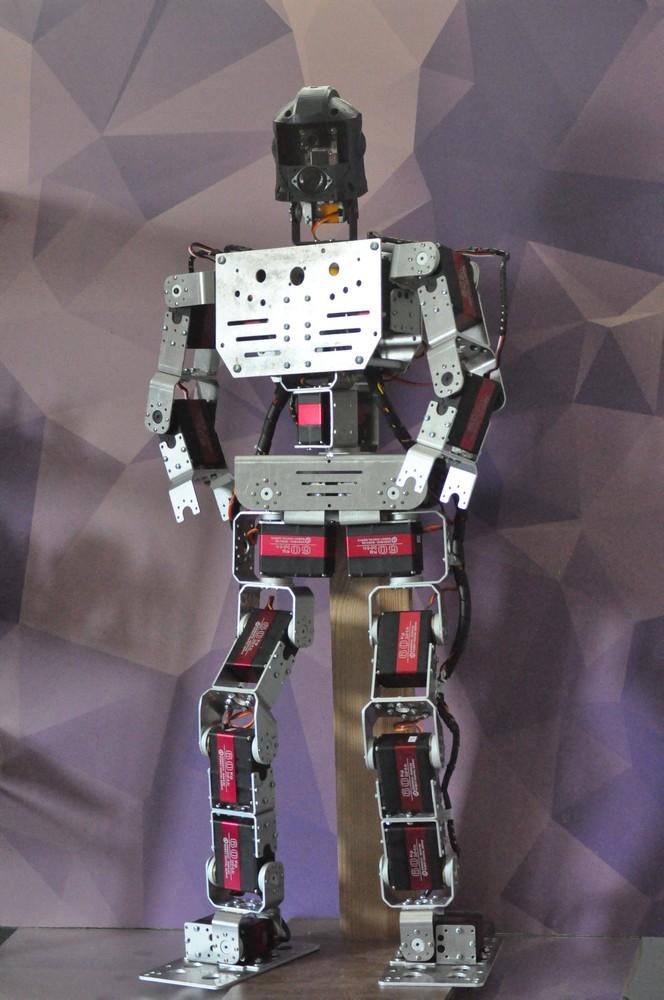
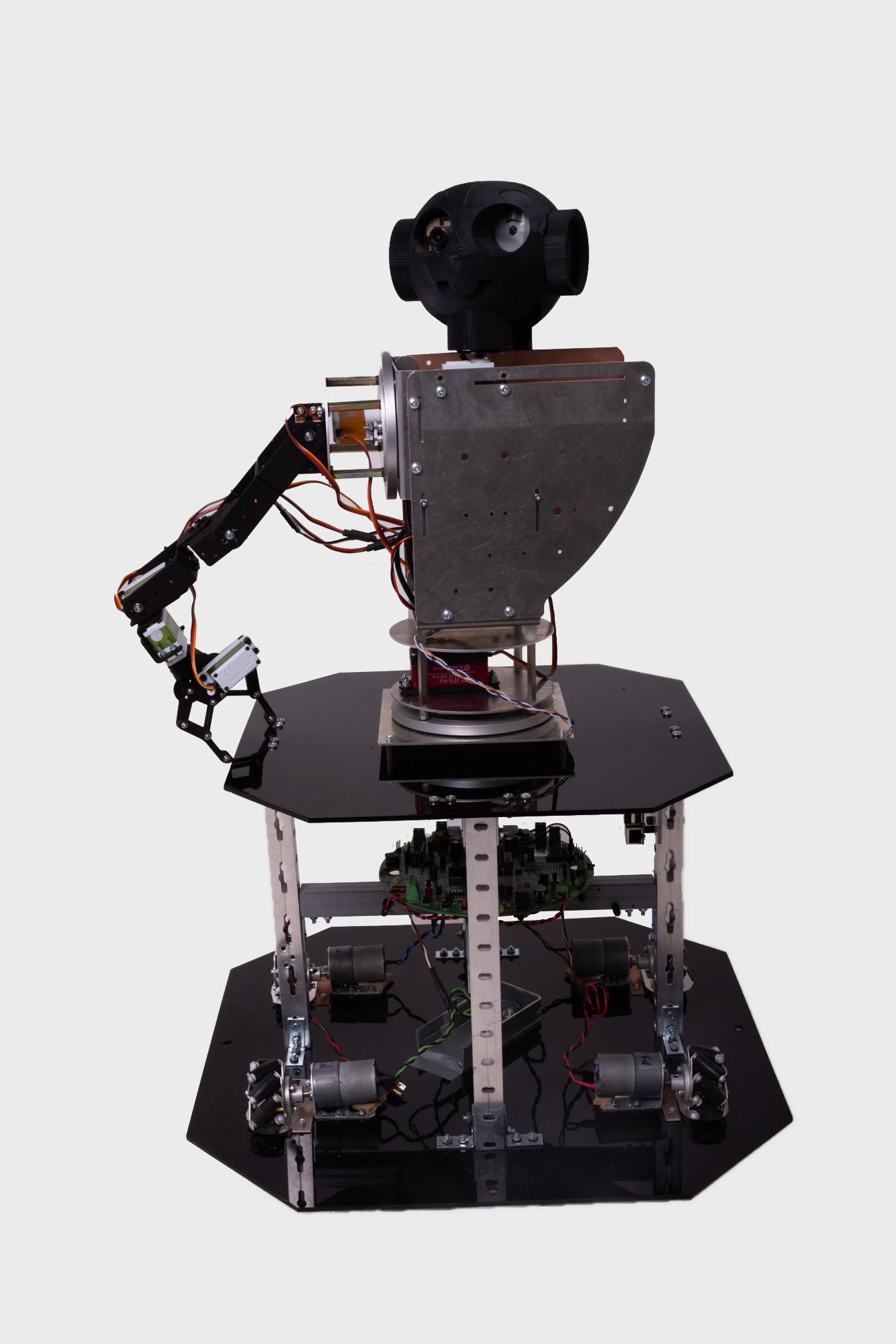
Uranus is a 22 dof humanoid robot developed by ERL with the aim of reaching 80 cm tall, thus exceeding the limit of previous projects.
Sakrim is a device consisting of a robotic arm that autonomously plays �TRIS� facing a human opponent.
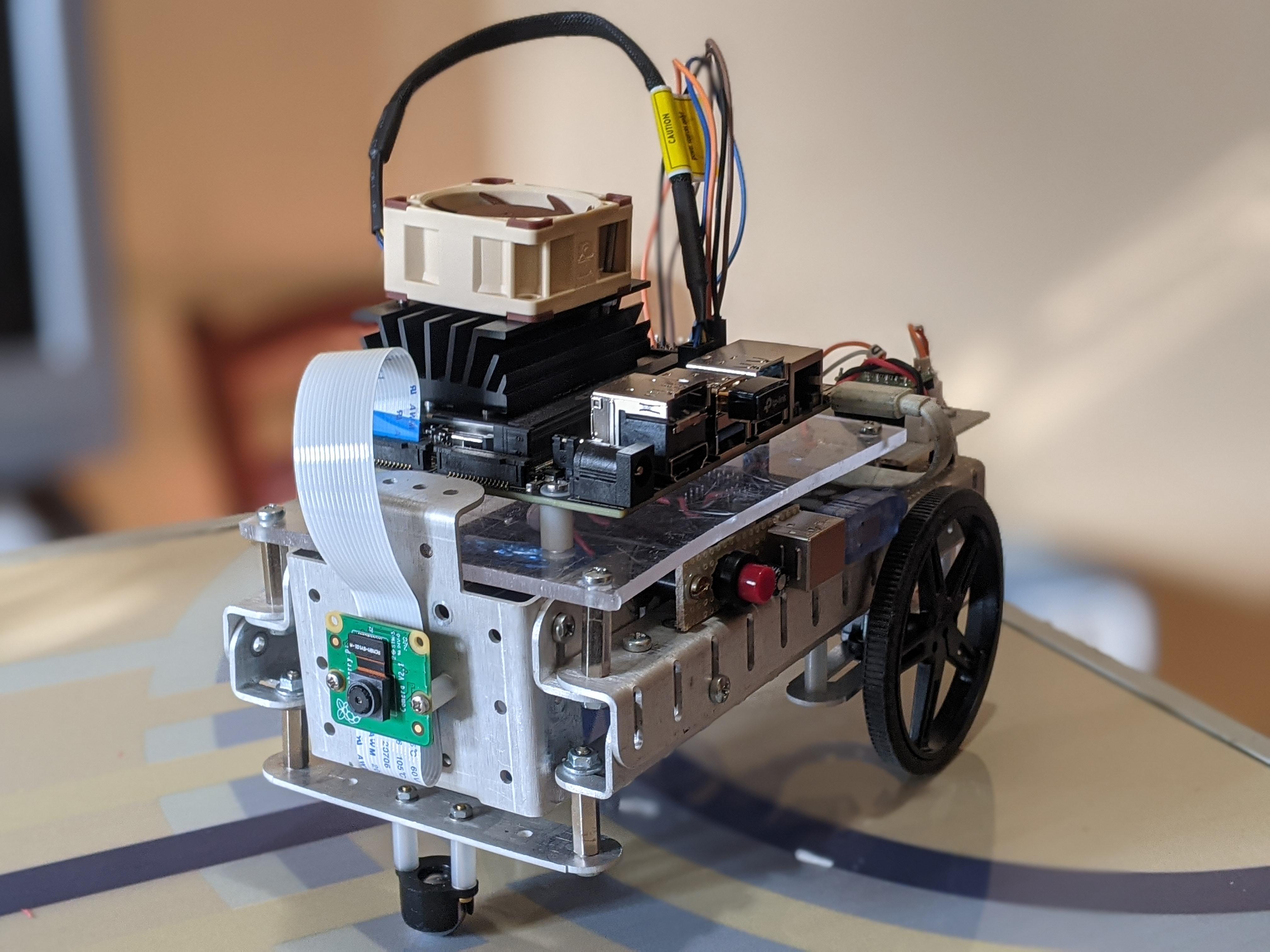
A small and versatile ROS-powered robot built to learn, experiment, and test artificial vision algorithms for robotic systems.
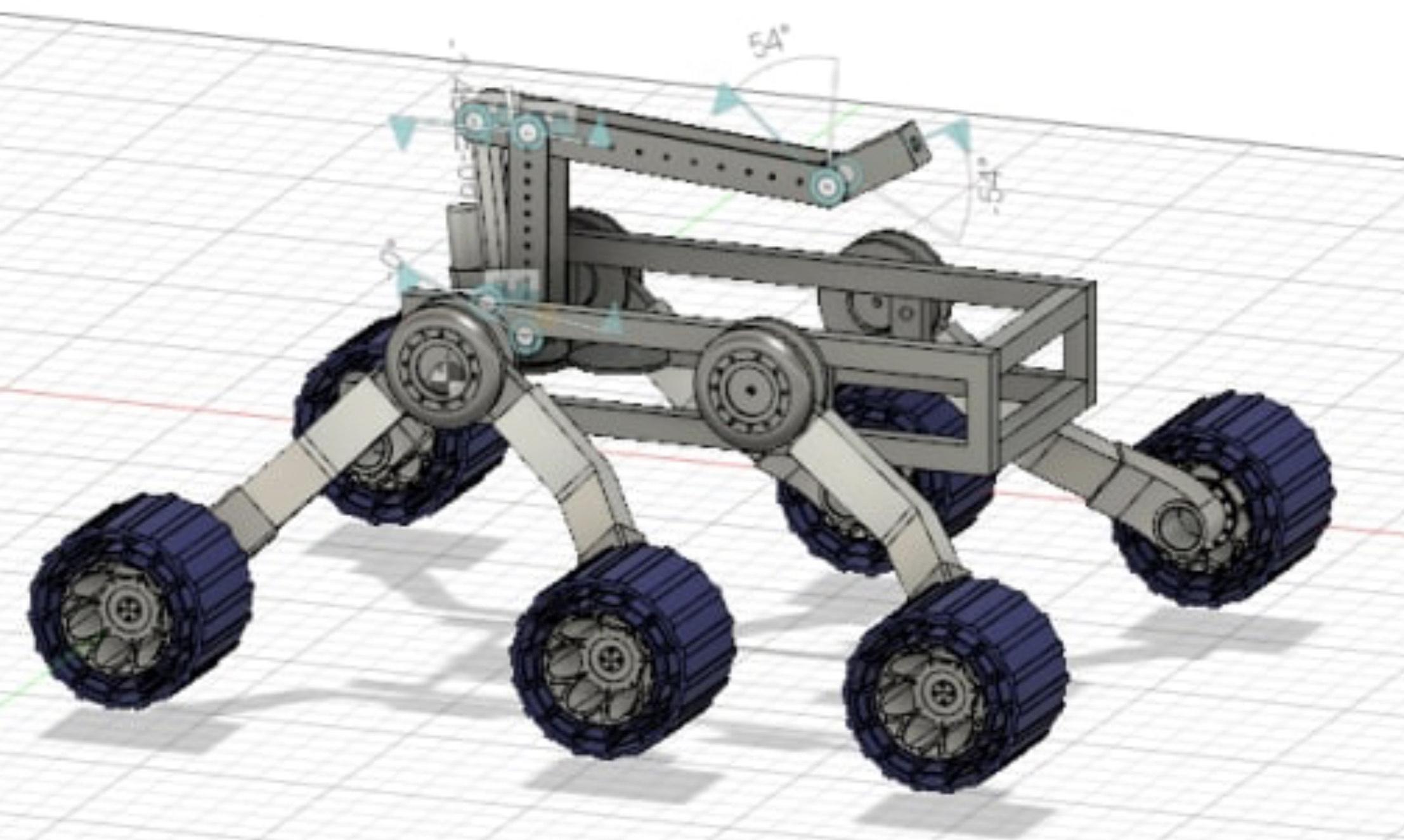
Design and build robotic systems similar to those used for space exploration
Scuderia Tor Vergata is the official Formula SAE Team of the University of Rome Tor Vergata, based in Rome, Italy.






































