
Exhibitors 2017
- DRONES
- EDUCATION
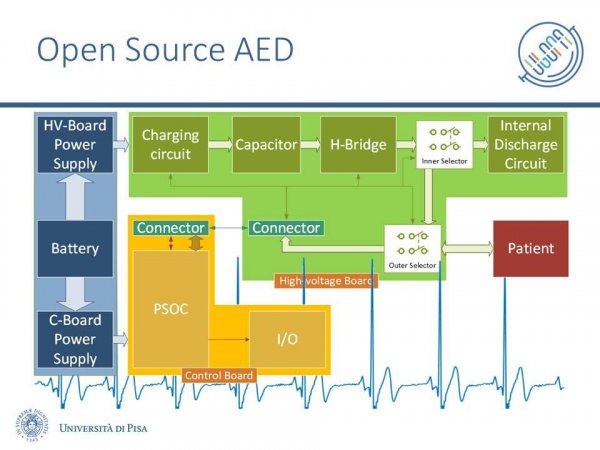
- OPEN SOURCE
- WELLNESS & HEALTHCARE
- FABRICATION
- KIDS & EDUCATION
- RECYCLING & UPCYCLING
- ROBOTICS
- ENERGY & SUSTAINABILITY
- 3D PRINTING
- HOME AUTOMATION
- INTERNET OF THINGS
- GAMES
- HACKS
- YOUNG MAKERS (< 18)
- FASHION & WEARABLES
- ART
- ARTISANS & NEW CRAFT
- CULTURAL HERITAGE
- MUSIC & SOUND
- STEAM PUNK
- 3D SCANNING
- NEW MANUFACTURING
- ARDUINO
- SCIENCE
- BIOLOGY
- FOOD & AGRICULTURE
- CROWDFUNDING
Result for TAG "Robotics"

Amnon Demri - Quickest-Owl
"cockroach " Laser shooter.
A laser display that "shoot" cockroach on a wall , using a web cam and computer vision.

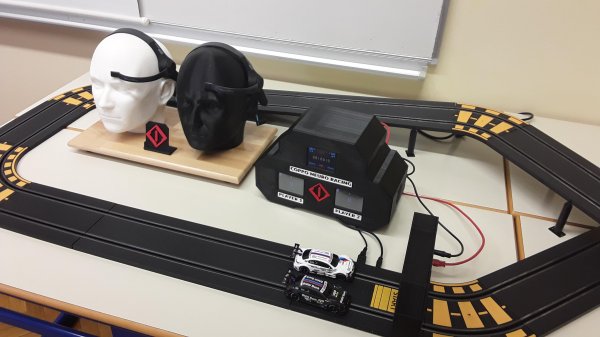
ANDREA BELLI, DAVIDE BELLI, FILIPPO BELLI, CARLO COLETTA, EMANUELE COLETTA, EMANUELE ALFANO, VLADIMIRO ERCOLINO, ANTONELLI VITTORIO
A REAL 3D PAC ROBOT MAN RADIO COMMANDED PRINTED IN 3D WITH REAL PHANTOM
SM Pietro Coppo Isola
Gli alunni dell'istituto tecnico Pietro Coppo di Isola presentano i lavori svolti durante l'anno scolastico e i progetti realizzati per l'esame di maturità professionale.

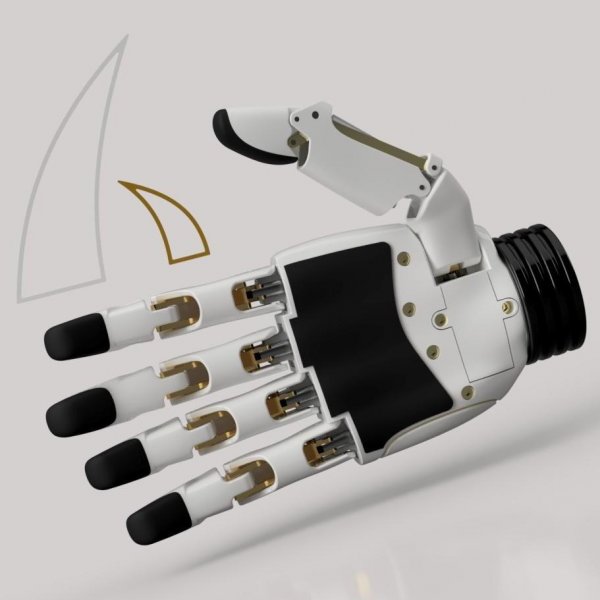
BionIT Labs
Adam’s Hand is an innovative myoelectric hand prosthesis: light, robust, low-cost and easy-to-use.

Robotic Thunder
ALBATROS, the versatile SmartPlane.
Take-off and landing of a quadricopter, flight time of an airplane.

Laura Giarré, Ilenia Tinnirello, Daniele Croce, Domenico Garlisi, Federica Pascucci, Federica Inderst, Giovanni galioto, Natale Galioto, Fabrizio Garlisi
By following pre-determined paths located in public places such as airports, shopping malls, museums, etc, visually impaired people can move independently in unfamiliar environments. Arianna is a flexible, low-cost navigation system which can be used in any indoor environment (airports, museums, hospitals, shopping malls) and outdoor (stations, sidewalks, etc.), and can provide localization information to any person (including non-blind people) because it is based on the use of an electronic device as pervasive as smartphones. The low cost and ease of use are key aspects to make the system accessible to all and guarantees a rapid dissemination. Thanks to Arianna, the visually impaired can increase their independence and social inclusion. Such as tactile paving, Arianna allows the visually impaired people to move from one place to another in a very easy, the advantages of the system are varied. The managers of the places easily install the strips, reduce the cost of the environment and provide users with an interactive and easily configurable, the system can be added many additional services.
The present Project (ARIANNA 2.0) is an extension wich integrating the inertial sensors on board achieve the goal of adding more precision, Additive Information and feedback are given to the user when the path on the floor is lost. See http://in.sight.srl
Michelangelo Pasinetti, Davide Stabelli, Daniele Gamba
Bionic Sync is an artificial, 3D printable and modular hand which merges additive and traditional manufacturing.
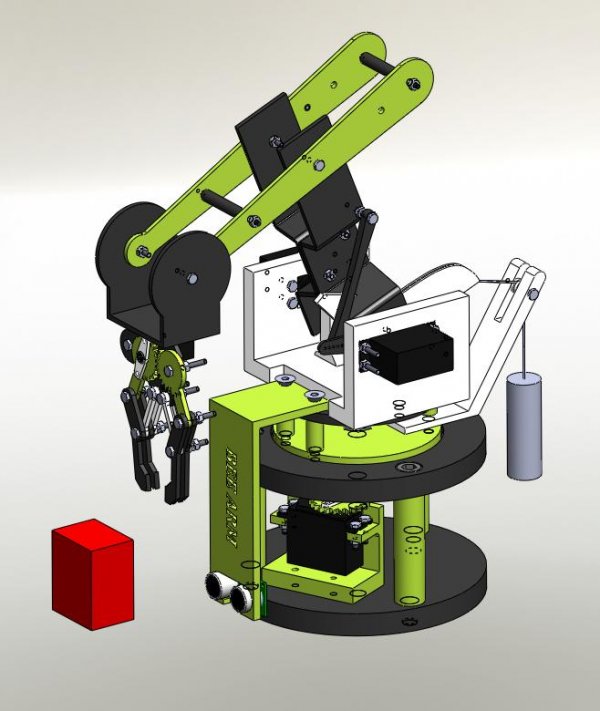
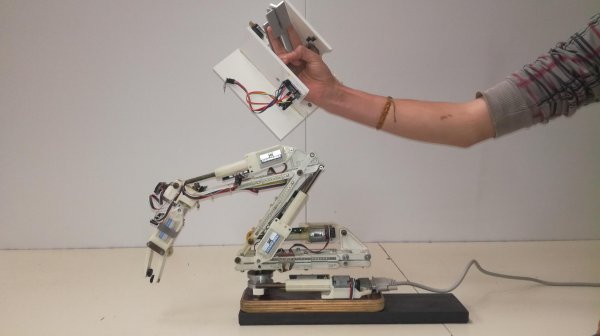
Istituto Tecnico Industriale Renato Elia di Castellammare di Stabia
The anthropomorphic robot is a programmable, robotic prototype to be used for further development and classroom exercises, designed to reproduce human arm movements in a nutshell.

CampuStore
Il motto di CampuStore è Innovation for education: porre l’innovazione al servizio dell’istruzione, a 360°. Non solo scuole e università quindi, ma anche …

Ludovico Gabrielli, Federica Piccardi, Stefano Di Pasquale
DeltaSat is a probe capable of reaching and exploring the stratosphere and transmitting images and data in real-time, then returning to the ground integrity for reuse.

Associazione DiScienza
DiScienza EduKit. Interactive Science activities. Technology and science for all

ENI
Eni is an energy company employing more than 33,000 people in 73 countries worldwide. Eni works to build a future which allows everyone to have access to energy …
Giovanni di Dio BRUNO
ERWHI is an open source SLAM robot with advanced feature like human interaction.

Giancarlo Pellis
Esoscheletro made by CT and customized by finding joint axes for the respect of the deambulatory kinematics.

Ex Robot team
A system consisting of a rover and a scanner capable of exploding explosive devices below any remote controlled motor vehicle to avoid any involuntary inconvenience.

5ECn, ITIS P.Paleocapa / principali autori Sermisoni Samuele e Crotti Luca
It is the realistic and working reproduction of Exomars rover. It moves, captures data, takes samples, and observes the world.
#nocomment
Incredibly cheap and ridiculously accurate alternative to expansive market gimbal solution

Thanos Tziatzioulis
Hand of Rob is a 3D Printed robotic hand that mimics the movement of the human hand with the wireless glove. The robotic hand is controlled through an Arduino and programmed in C++ language
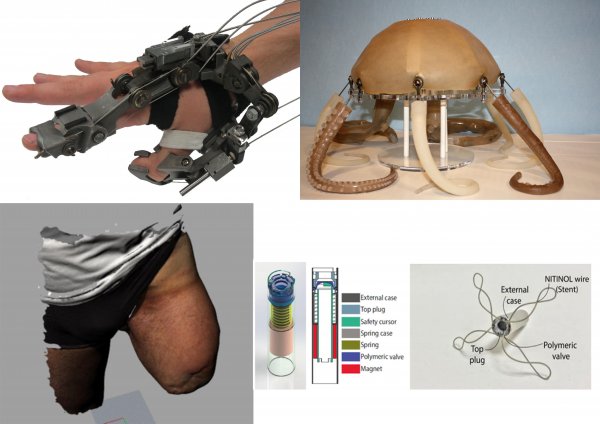
Nicola Vitiello, Cecilia Laschi, Arianna Menciassi
Wearable Robotics aim to develop mechatronic devices to improve the activity of the human user in scenarios of rehabilitation, assistance and human augmentation.
Soft robotics is an interdisciplinary field in robotics that deals with robots built out of soft and deformable materials
Development of smart prosthetic socket with custom design, development of magnetically controlled artificial sphincters

Chiara e Luca Randazzo
Hubotics is a wearable upper-limbs exoskeleton which aims at enabling intensive use, directly at home, by people with motor disabilities. The device is entirely realized using 3D-printing and open-source components, being versatile and extremely customizable to the needs of different users.
Davide Aloisi e Alessio Di Brigida
L.E.O. is a robot capable of improving and facilitating learning in schools and not only by having fun.

Maksim Masalski
Maker Kit E1it is an educational electronic kit for those who are interested in learning about simple electronics creation.
Istituto M. Massimo, MakingOpen.net team coordinated by Claudio Becchetti with Fabio Topani head of R&D
Professional open source Robots built from 10 years old: no geniuses but 60 students who want to have fun

Antonio Bicchi, Gaspare Santaera, Giacomo Dinuzzi, Manuel Barbarossa
robotic hand, simple, robust, effective, soft manipulation, soft synergies, natural motion, single motor, humanoid robotics, prosthetics, human-robot interaction
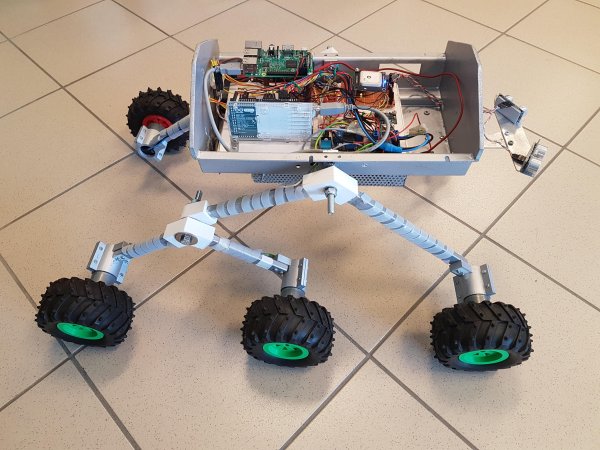
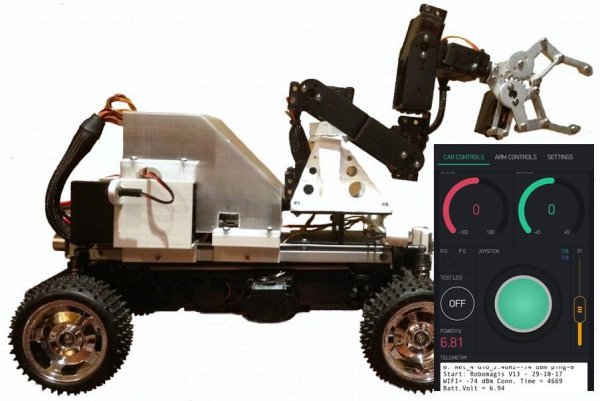
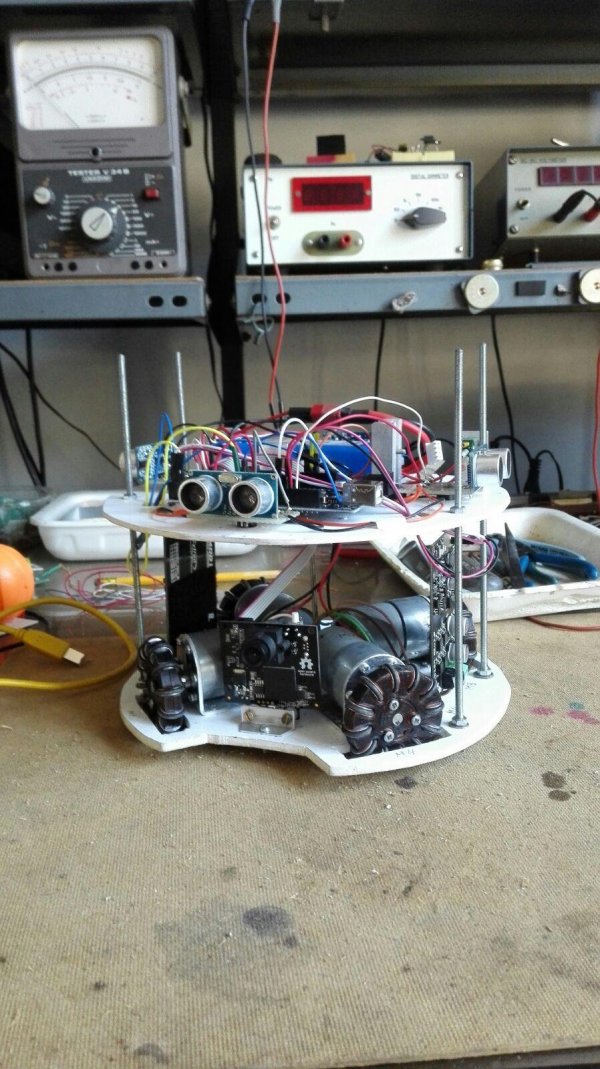
ITT "Guglielmo Marconi" di Staranzano (GO), gruppo "Progetto robotica"
Scout rover with 6 wheels, a camera, autonomous movement and remote control via smartphone. Inspired by the original NASA's rover.

Giuseppe Ferrò, Luca Boncagni, Daniele Carnevale, André Neto, Filippo Sartori
A new real-time control architecture for plasma fusion reactors has been customized for robotic systems. As an application, a 6DOF robot is controlled via kinect

Lorenzo Daidone
I like to move it - framework for the development of interactive applications. Fields of application: robotics, gaming and healthcare.
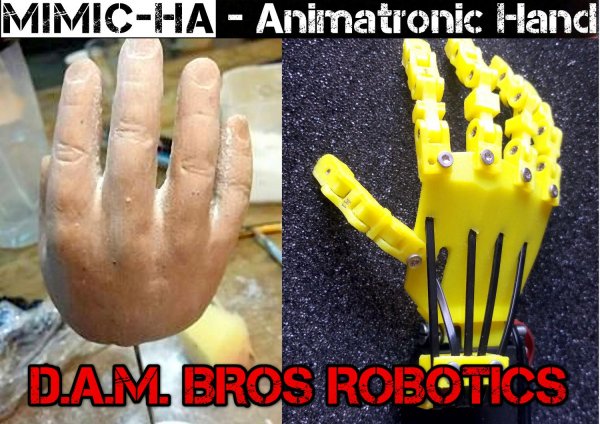
DAM Bros Robotics
Animatronic hand with force sensors and realistic skin. Ideal for the film industry or as a cheap prosthesis.

Federico Gualdi, Roberto Lucchisani, Nicholas Silvestri
Optical Wheelchair was developed to increase the autonomy of disabled people. It can detect face expressions with a particular Intel camera which manage the wheels consequently

Mattia Strocchi
Orion is a wearable system capable to enhance human physics skills through an exoskeleton, controlled with ease by your gestures.

Giuseppe Airò Farulla, Andrea Bulgarelli, Marco Indaco, Ludovico O. Russo
A Telecommunication System for Deafblind People.

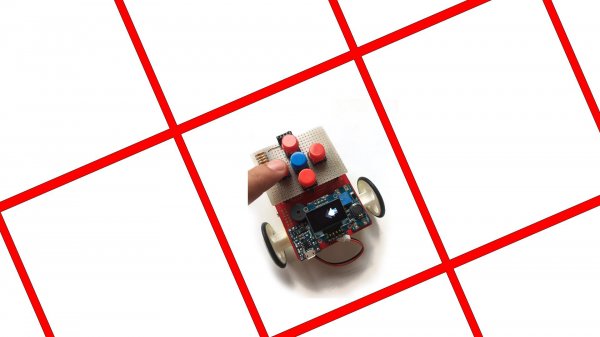
Mirco Piccin
playROS is a project to explain how ROS (Robot Operating System) works, by playing a simple and well known game: Tic Tac Toe.
Silvia Rossi
E-Health, Assistive Technologies, Assistive Social Robotics, Alzheimer

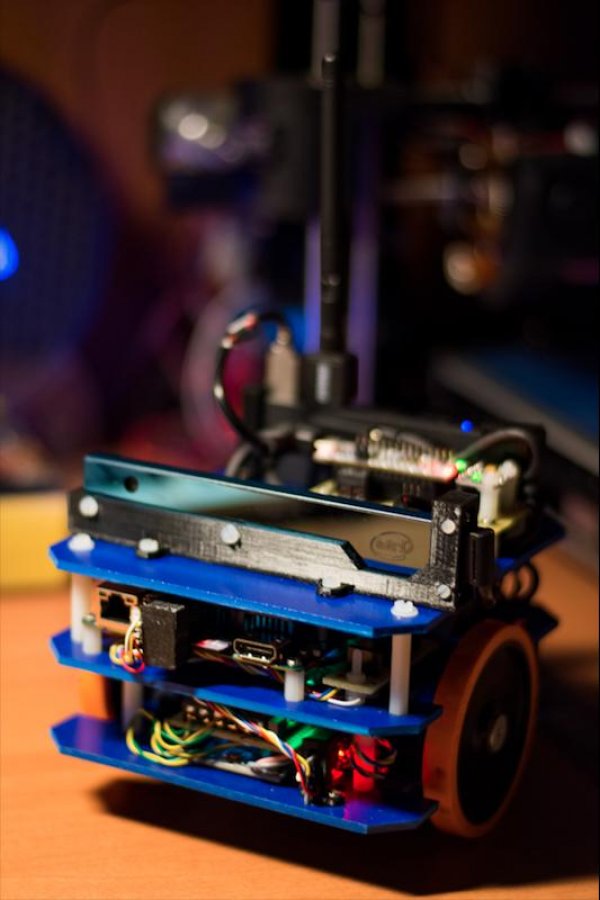
Niklas Sallali
Rhex is an open source hexapod robot able to walk, make complex movements and track defined color objects.

Dmitry Vasilenko, Maksim Masalski, MRobot Team mrobot.by
RoboCards -an electronic DIY-postcards for present and for creation. RoboCards it is eye-catching and imaginative electronic postcards kits that can be assembled without glue or soldering.

Silver Kuusik, Ivana Atanasova
RoboKoding enables children to learn electronics, robotics and programming in a fun, interactive and collaborative way.

Istituto Tecnico per il settore Tecnologico "G. Marconi" classi 4° e 5° elettrotecnica-elettronica
Four androids form a musical band composed of: drum, keyboard, guitar and bass. An androide dancer dancing.

Giuseppe Palestra
Robot4Children has developed an integrated robot-software solution coupled with an innovative approach to assisting children affected by autism spectrum disorders.
•Lucia Pallottino • Manolo Garabini •Danilo Caporale • Stefano Giordano •Vincenzo Ferrari •Carmelo De Maria •Di Pietro Licia.• Giuseppe Caruso •Ilias Seitanidis •Clara Amato •Giuseppe Portaluri
Safety, security, precision and performance in industrial, clinical and on-cloud environments.

SANBOT.IT
The new Sanbot platform is the result of years of research and development and enables the potential of Cloud and Artificial Intelligence to grow in retail, hos …

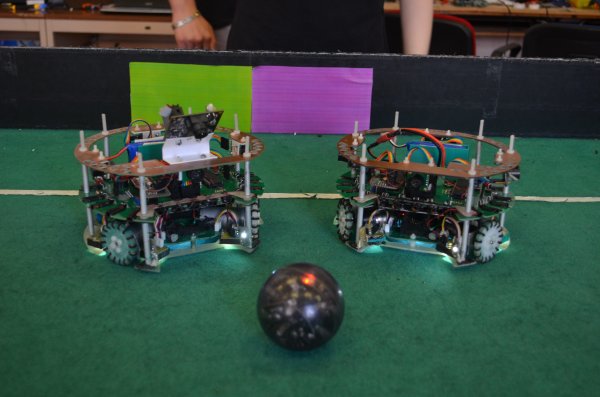
Liceo Scientifico Bruno Touschek (Grottaferrata RM)
As students of a Scientific Highschool we present a completly autonomous prototipe with the aim of playing a football game.

SOCIETA' REGIONALE PER LA SANITA' - SO.RE.SA. S.P.A.
SO.RE.SA. S.p.A. with a single Partner
Headquarters: Directional Center Isola F9 - 80143 Naples
Tel. 081-2128174 - www.soresa.it
Soresa SpA - Regional Heal …

Sviluppo Campania SpA
Sviluppo Campania is an in-house company of Regione Campania. Its mission is to contribute – under the Regione Campania guidelines – to carry out plans, pr …
Antonio Ianiero
Thaumachines - Tecnologies that induce wonder.
An exhibit of machines that do amazing things for the viewer.

Università Telematica Internazionale UNINETTUNO
The University of the Future: UNINETTUNO, the only distance learning university in Italy successfully assessed by ANVUR and Ministry of Higher Education, contin …

Umberto Scarcia, Gianluca Palli, Lorenzo Moriello, Claudio Melchiorri. LAR (LABORATORIO DI AUTOMAZIONE E ROBOTICA, UNIBO)
The research group o f the Automation and Robotics Lab of the University of Bologna would like to share with the Maker Faire 2017 audience the latest results in the field of anthropomorphic robotic hand prototyping and telemanipulation. We will bring some of our recent products and a set up able to allows the untrained user to control intuitively the hand trying to grasp common objects.
Classi terza quarta quinta manutentori elettrici elettronici dell'Ipsia G. Ceconi Gruppo "latuaideadimpresa" simulazione startup.
The Universal Remote Controller is a glove with sensors that controls up to 5 axles devices through a wireless signal.
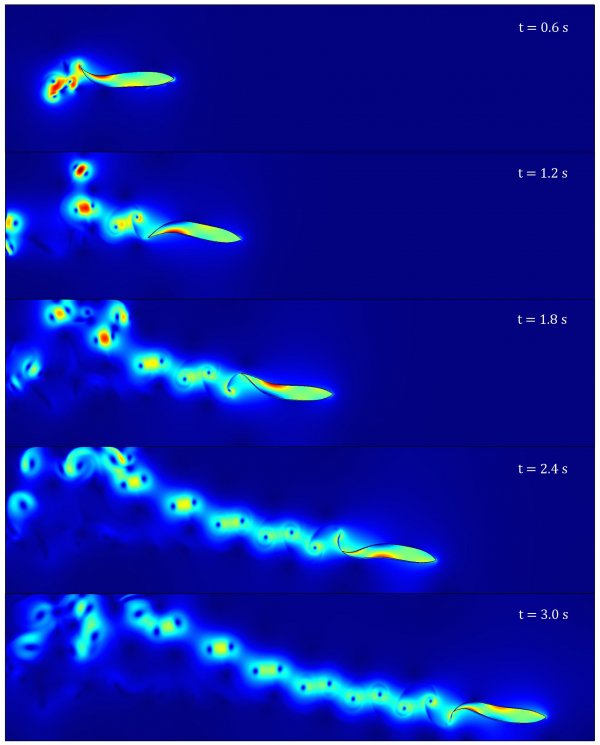
Michele Curatolo, Luciano Teresi
We use Finite Element Methods to solve the problem of fluid structure interaction for a swimming fish






































