
Exhibitors 2019
- 3D PRINTING
- ART
- EDUCATION
- HOME AUTOMATION
- INTERNET OF THINGS
- KIDS & EDUCATION
- RECYCLING & UPCYCLING
- ROBOTICS
- SCIENCE
- YOUNG MAKERS (< 18)
- BIOLOGY
- GAMES
- ARTIFICIAL INTELLIGENCE
- OPEN SOURCE
- NEW MANUFACTURING
- FABRICATION
- WELLNESS & HEALTHCARE
- ENERGY & SUSTAINABILITY
- FOOD & AGRICULTURE
- 3D SCANNING
- CULTURAL HERITAGE
- AEROSPACE
- HACKS
- MUSIC & SOUND
- ARTISANS & NEW CRAFT
- FASHION & WEARABLES
- DRONES
- STEAM PUNK
- ARDUINO
- CROWDFUNDING
Result for TAG "Robotics"

V. Sperati, B. Özcan, L. Romano, S. Scaffaro, T. Moretta, N.Faedda, V. Guidetti, G.Baldassarre
+me is an experimental interactive toy, designed like a potential tool for therapy in
Neurodevelopmental Disorders.

Pietro Amodeo (ICB-CNR), Francesco Castelluccio (ICB-CNR), Salvatore Donadio (ICB-CNR), Alessandra Rocco (INO-CNR), Simona Mosca (INO-CNR), Maria Parisi (INO-CNR), Valentina Di Sarno (INO-CNR), Gianluca Notariale (INO-CNR) - a cura di: MoSeF – ICB-CNR,
RoFlEx is a robotic exhibit to demonstrate fluorescence and spectroscopy, representing an attractive and effective tool for science communication.

Robotics for Rehabilitation team
PLANarm2 is an end-effector-based parallel robot for neurorehabilitation. It allows the patient to practice planar movements of his hand, exploiting both elbow and shoulder movements. The movement of the manipulandum held by the patient is controlled by two motors. The device is equipped with two load cells to measure the force exchanged with the patient. Force-based and adaptive control algorithms enable the device to help the patient in performing rehabilitation tasks according to his capabilities and his level of impairment. A graphic environment proposes interactive and engaging tasks. The device has been designed to be clamped on one side of a table, also in a domestic environment. The modularity of the ROS-based control system will enable a straightforward integration of additional devices

IAS-Lab (Intelligent Autonomous Systems Laboratory), University of Padova
The SPIRIT project is a research project funded by the European Union which aims at developing a general inspection robot framework that takes the step from programming complex inspection tasks to configuring such tasks. This includes inspection tasks that use image-based sensors and require a continuous motion to fully scan a part’s surface. SPIRIT will substantially reduce the engineering costs when setting up inspection robots in industrial environments.

Andrea Chesi IIS Tito Sarrocchi Siena
The goal of the "leap - done" project is to pilot a complex system, such as a drone, using hand movement instead of a normal radio command. The sensor used to achieve this goal is a "leap motion" camera.

Clementoni R&D
We would like to collect needs and ideas meeting children, makers and AI experts to discuss about AI smart toys

The Air Busters - IV B ITET “Rapisardi Da Vinci” - Caltanissetta
It provides real-time information on the polluting gases existing throughout the territory by surveys from mobile analysis stations.

Alan Advantage
Alan Advantage srl, with offices in Rome and Boston, is active for more than ten years in Innovation, deals with strategic consulting activities.
The company …
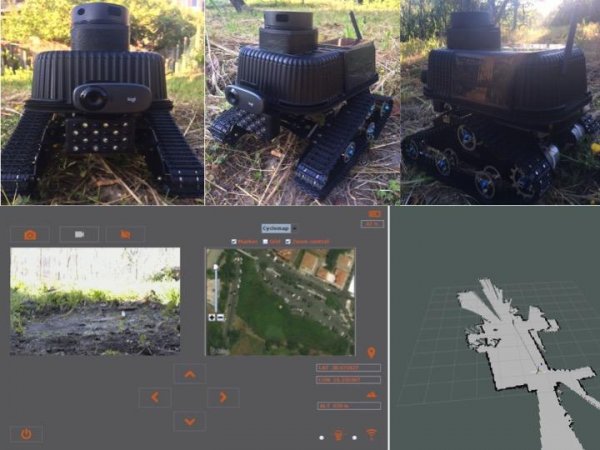
Giuseppe Massaria, Antonio Idà
ALAN-2 is a tracked Robot for military use. It has GPS, supports automatic learning, autonomous navigation and the NAV function with which it is possible to give a mission. The ROS system combined with a Neural Network provide access to the A.I. It is equipped with a Smart Charging Station (custom).

MAURIZIO ESPOSITO, FABRIZIO MARIGNETTI, ERIKA OTTAVIANO, ALESSANDRA SANNELLA, GIUSEPPE TOMASSO
Our project is based on the idea that environmental and social sustainability are two faces of the same coin and that there are strong connections between technological innovation and social engineering.

Colegiu Tehnic Gheorghe Cartianu, grades 9-12
Main objective: the development of technological education in order to have well-prepared students which can be capable to master and efficiently explore the new technologies.

Arrow Electronics Italia s.r.l.
Arrow is a global provider of products, services, and solutions to industrial and commercial users of electronic components and enterprise computing solutions.
…

Unione Astrofili Italiani
This Project presents the design and construction guidelines for a small personal remote observatory

Giovanni Bernardini, Massimo Gennaretti, Jacopo Serafini, Valerio Vezzari
Robotized test bench equipped with structural monitoring FBG fiber optics sensors , dedicated to real time structural characterization of aeronautical parts.

IIS GAE AULENTI - Biella (Gruppo ENT)
Tree robot, able to protect plants and talk to them.

Black Brain Robotics Inventor.
The black brain creative robotics mechanism project.

Michelangelo Bornò, Franco Ferrini
Robotic arm, with six (6) degrees of freedom, made with a new type of 'back-lash free' articulation.

CampuStore
CampuStore brings new ideas and visions at Maker Faire Rome, again: close to the Kids Area organized by Codemotion Kids!, CampuStore takes part to the exhibitio …

Carlo Alberto Pinto
Captiks provides innovative systems for motion analysis by using wearable sensors for Sport, Rehabilitation and Research
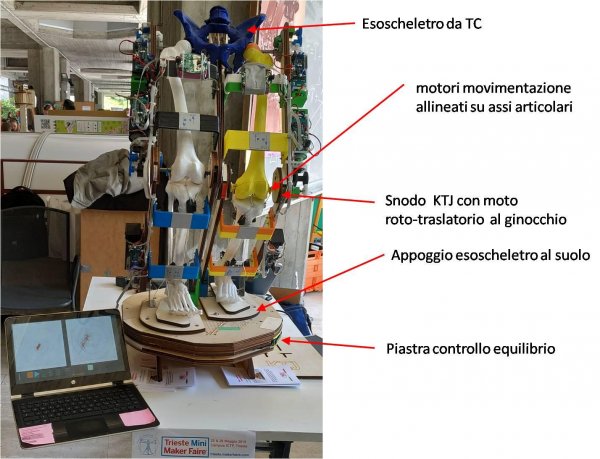
Giancarlo Pellis
The project aims to have a control tool to keep an exoskeleton in balance during flexion-extension of the lower limbs.

DIAG Robotics Laboratory - Sapienza Università di Roma
Research activities at the DIAG Robotics Laboratory, Sapienza University of Rome.
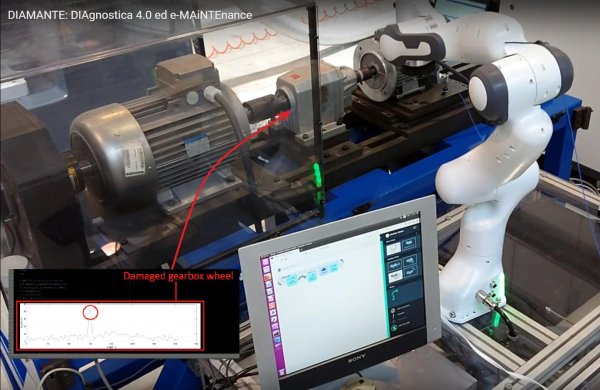
Marcello Bonfè, Emiliano Mucchi, Federico Contro, Alessio Sozzi
Collaborative robotics for industrial production monitoring, diagnosis and quality control, integrating advanced noise and vibration analysis techniques.
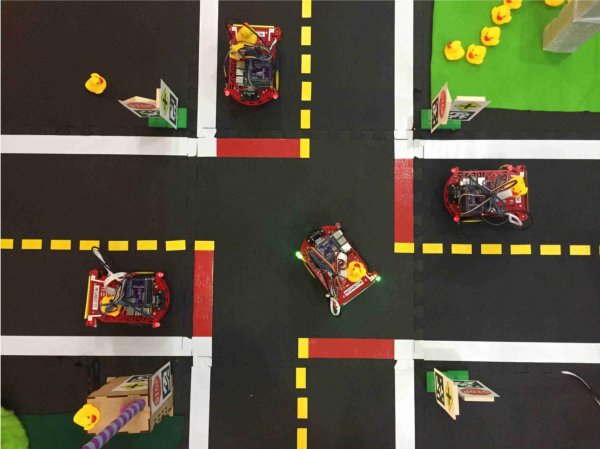
Duckietown Foundation
The state-of-the-art robotics and AI education and research platform designed to enable the makers of the next generations of autonomy.

4°-5° Esc, Liceo Monti Chieri (TO)
"Eagle & Beagle" is formed of two robots which interact: a drone (Eagle) and a rover (Beagle).

EMC Elettronica Srl
Elettronica Open Source is a blog born in 2006 with the aim of spreading quality articles and allowing the exchange of ideas and experiences between electronics …

Martin Romeo
innovation, 3dprint, interactivity, interaction design, visual art, profume, arduino, raspberry, essential oil, fragrance, technology, hybrid, premiere, smartphone, image, color, percentage, multimedia, led, art

Daniele Carnevale, Luca Calacci, Andrea Monti
ExoWay: a first prototype of wheeled exoskeleton

Team: Idealizer: Weslley Lioba Caldas Coordinator: José Gleisson da Costa Germano Advisor: Sandro Costa Mesquita Researcher: Tiago Diógenes de Araújo
The project consists in a glasses for visually impaired with the objective of aid the user's displacement,giving a better independence.

Samuele D'Angelo, Francesco Brocca, Vittorio Ludovico Viero
Gemini is a smart DC motors controller for application that requires constant speed.

Emanuele Della Volpe
Development of innovative multi-functional technological solutions through aerial, terrestrial and marine interconnected Unmanned Systems

Manuel Dadda, Stefano Picco, Andrea Zoli
Drone used in case of eathquake, take photos to buildings, show probability to find people trapped thanks to artificial intelligence.

HTWK RoboCup team
The Nao-Team HTWK Leipzig partecipates in RoboCup SPL with fully autonomously NAO robots. In 2018 the team won the RoboCup.

Domenico Prattichizzo
Wearable robotic and haptic devices, applications in rehabilitation and patient assistance, virtual and augmented reality, robot teleoperation.

Ingenuity Labs Research Institute
What do pendulums and walking have in common? Learn about the science behind human locomotion with your new robot companion.
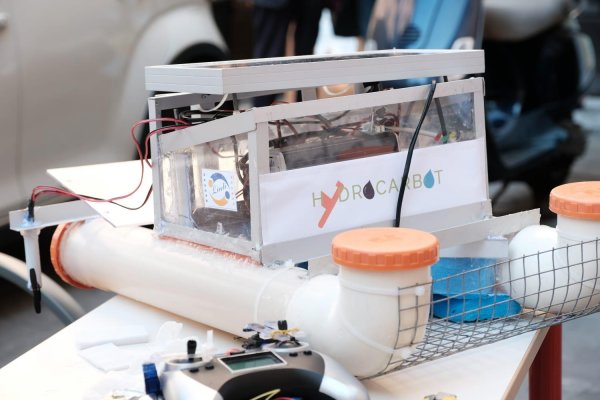
Giorgio Bernardini, Alberto Conte, Luca De Ponti, Tommaso Pa
Hydrocarbot can purify water from oily substances(oil, fuel, diesel...) making them reusable.
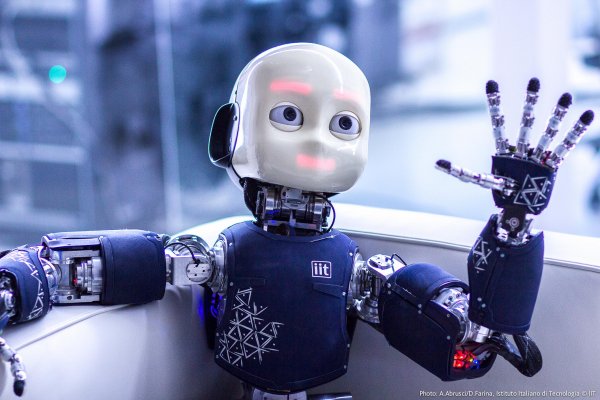
ISTITUTO ITALIANO DI TECNOLOGIA
Robotics and AI technologies developed by Istituto Italiano di Tecnologia within its research activity.

Il Brevetto - Giornale delle Invenzioni
The “Genius” is the main theme of the magazine “The Patent”, the curiosity and passion for innovation are the values of an editorial staff that was born …
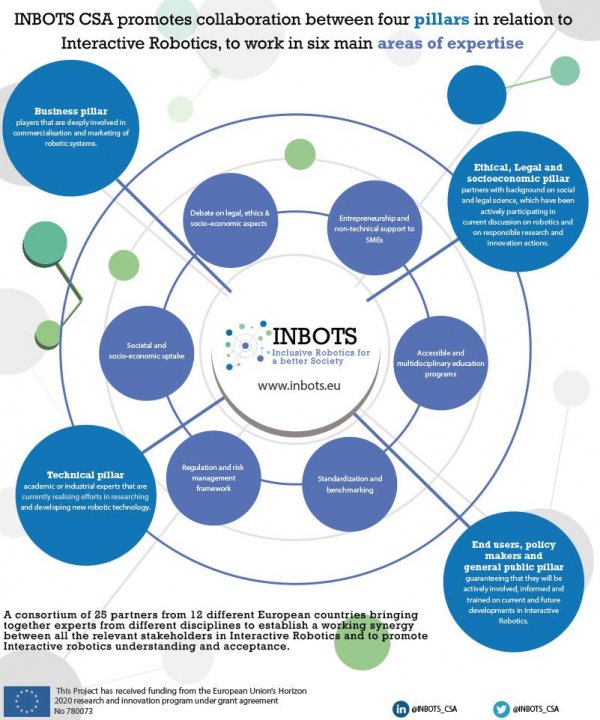
SIRSLab Group
INBOTS project brings together experts from different disciplines and European countries involved in the understanding and acceptance of Interactive Robotics.

Matteo Bianchi, Manolo Garabini, Lucia Pallottino, Vincenzo Ferrari, Carmelo De Maria, Alessandro Tognetti
Solutions for assistive and medical applications, autonomous, mobile and industrial robotics, and advanced human-machine interaction

Robotics@PoliTO
The project showcases demonstrators and presentations on the activities in the fields of industrial and service robotics at Politecnico di Torino. Drones, Virtual Reality, Wearable Devices, Industrial robots, Service Robots for agriculture and other applications will be the protagonists of our space at Maker Faire.
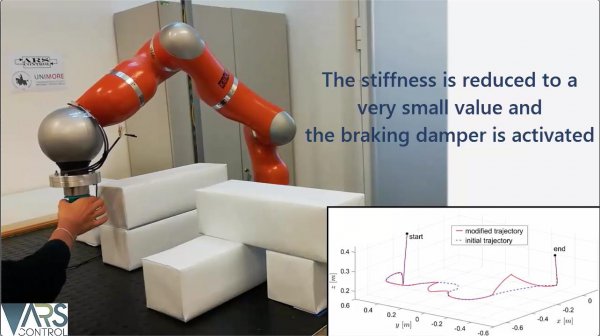
ARSControl Team
In the POP we will illustrate the research on robotics carried on in the ARSCONTROL lab.

Dipartimento di Informatica, Università di Verona
Innovation research and teaching in the new ICE Lab at University of Verona.
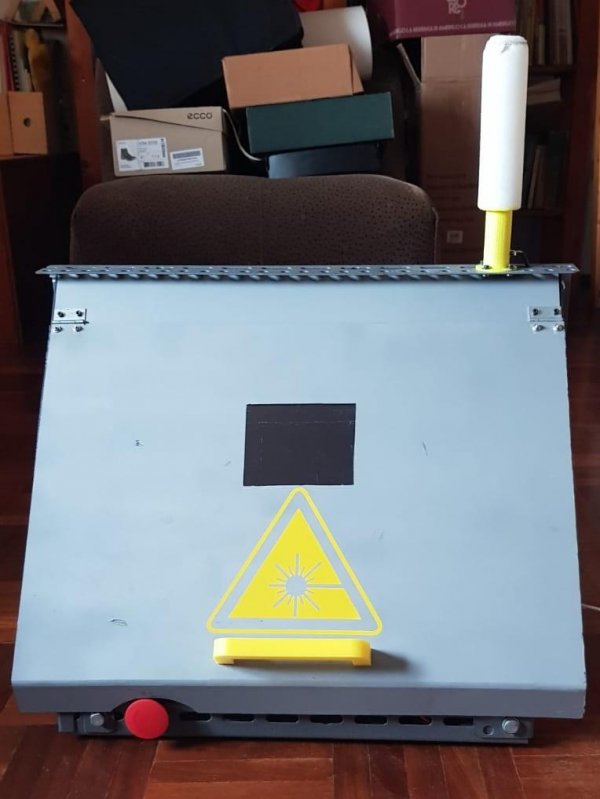
Mariglen Ymeraj, Filippo Guerra, Davide Cassanelli, Giovanni Gibertoni, Giuseppe Antonello Gentile
Laser Engraver is a small CNC machine for engraving images on several materials like wood, plastic, leather and many others.

Michele Tavolacci
explore remote spaces just a videocall
build your personal robonoise
and take control from remote.

Libertà di vivere - ITS Meccatronico - Treviso
A device that aims at increasing the mobility of people with lung capacity handicap and treated with home oxygen therapy

Istituto Massimiliano Massimo di Roma, gruppo Making Open: Claudio Becchetti, Fabrizio Olati, Paolo De Gregorio, Fausto Poletto, ...
Build, Try and See Space Technologies (rockets, robots, … ) designed by the students of the Massimo Institute of Rome

Istituto Massimiliano Massimo di Roma, gruppo Making Open: Claudio Becchetti, Fabrizio Olati, Paolo De Gregorio, Fausto Poletto, ...
Build, Try and See Space Technologies (rockets, robots, … ) designed by the students of the Massimo Institute of Rome.

Marta Baratto, Silvestro Roatta e Marco Testa
Device for assessment and traning of force supply and control in pinch and bite activity

Francesco Re
"Maintenance 4.0 for Dr Robot" is an advanced maintenance system at the service of an innovative surgical robot developed by the start-up Valuebiotech.
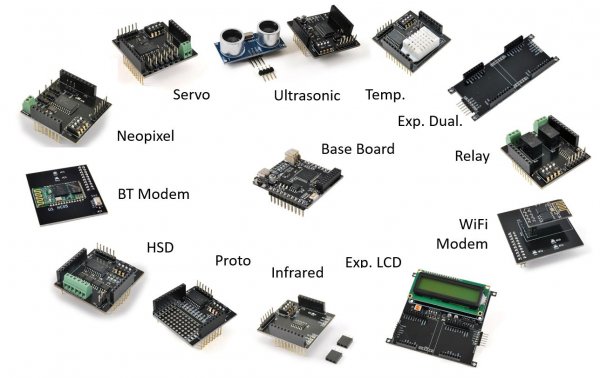
Francesco Ficili, Anna Falco, Antonio Volpe
The Mercury System is a modular HW/SW development system which simplifies design and implementation of Connectivity and IoT applications.





































